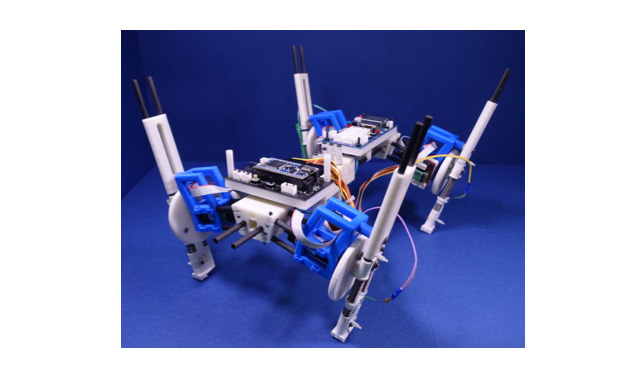
東北大学電気通信研究所の石黒章夫教授らの研究グループは2017年3月22日、四脚動物が移動速度に応じて足並みを自発的に変化させる現象(歩容遷移現象)を,四脚ロボットで再現することに世界で初めて成功したと発表した。
四脚動物の多くは、移動速度に応じて、足並み(歩容)を、ウォーク(左後脚、左前脚、右後脚、右前脚の脚順で接地)からトロット(対角脚が同期して接地)、ギャロップ(前同士、後同士がほぼ同期して接地)と、エネルギー的に効率のよい歩容へ自発的に遷移することが知られている。しかしこの歩容遷移現象の背後にある脚間協調のメカニズムは明らかではなかった。
今回の研究では、動物の動きをロボットに再現させることでそのメカニズムを明らかにするというアプローチが採用された。脚間協調メカニズムのみに焦点を当てるため、1本の脚の構造は1自由度というシンプルな構造とし、運動を生成するコントローラには位相振動子というシンプルな振動子モデルを採用。さらに、あらかじめプログラムするのではなく、「脚に荷重がかかっている間は、そのまま身体を支持し続けようとする」というシンプルな制御則により、それぞれの脚が運動リズムを調整するだけで脚間協調パターンを生成した。
こうして開発した四脚ロボットを、移動速度パラメータのみを変化させトレッドミル上で歩行実験を行なったところ、移動速度のみの変化によって、ウォークからトロット、ギャロップへと自発的に歩容遷移することが確認された。さらに、トロットからギャロップへの遷移過程では、ウマの歩容遷移でもみられるキャンターと呼ばれる左右非対称な歩容も確認されたという。
今回の研究結果は、四脚動物の移動の仕組みを解明する生物学的意義に加え、ロボット工学においては、メインコンピュータで逐一身体の各自由度を制御する既存の中央集権的な制御アプローチに対して、各脚からのセンサー情報のみを用いて脚の運動リズムを調整し、足並みを自発的に生成するという自律分散的な制御アプローチを新たに提供すると期待される。四脚動物に近い運動能力をもつロボットの工学的実現のための基盤技術となることも期待できる。
さらに、災害現場などで柔軟かつ効率よく移動するロボットや、飼い主の速度に合わせて自発的に足並みを変化させる四脚ロボットの構築、自動的に動物のアニメーション動作を生成するアルゴリズムの構築などにもつながるとしている。