⽪膚型の触覚センサを搭載したヘビ型ロボット
京都大学、早稲田大学、岡山大学、金沢大学の研究グループは2017年9月1日、複雑な配管内を走破し、配管内の状況を正確に提供できるヘビ型ロボットを開発したと発表した。
ヘビ型ロボットは、複雑な環境の検査や点検を目的に開発されてきた。その適用の一つとして、プラント設備の配管内外の点検が挙げられるが、これまでのロボットではオペレーターに提供される情報が限られ、複雑な配管内でロボットを操作するのは困難だった。
今回開発したヘビ型ロボットは、20個の関節を持ち、皮膚型触覚センサーである全周圧力センサーを搭載。従来、操作が難しかった曲管を含む複雑な配管内の走破を実現した。また、管の入り口に設置したスピーカーから音を発生させ、ヘビ型ロボットに装着したマイクで捕捉。到達時間の差によって、配管内のロボットの距離の推定が可能だ。この情報と慣性センサからの進行方向情報、そして多関節モデルによる姿勢推定を組み合わせることで、現在位置と姿勢の推定、さらには配管地図の同時生成が可能。情報の可視化技術も開発しており、配管内点検時にヘビ型ロボットの状態や配管内部の様子を確認しながら遠隔操縦できると説明している。
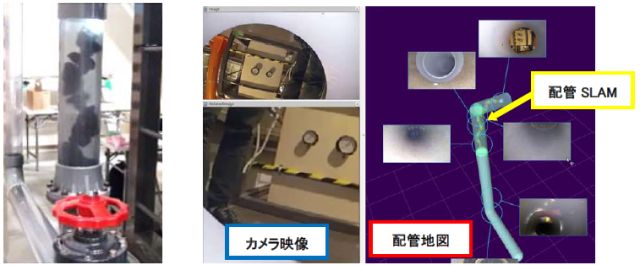
水平管から曲管を経て垂直管の内側を走破するヘビ型ロボット(左)、配管内点検用遠隔操作インタフェース(右)
今後は、防水防塵機能を実装し、また半自律制御機能、故障診断と故障時やタスク失敗時のリカバリー機能、直感的で柔軟なユーザーインターフェースの開発を進めるとしている。これらの技術の導⼊により、プラントの配管設備の日常点検だけでなく、災害発生時の初動点検での運用も見込んでいる。