- 2017-10-3
- ニュース, 制御・IT系, 電気・電子系
- JAPERA, NEDO, 新エネルギー・産業技術総合開発機構, 次世代プリンテッドエレクトロニクス技術研究組合
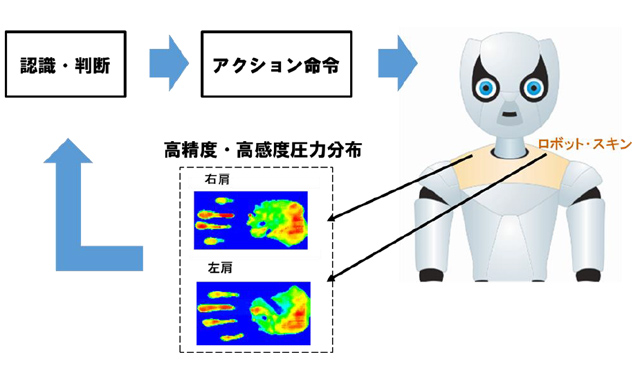
ロボット・スキンをヒト型ロボットに搭載したシステムのイメージ
新エネルギー・産業技術総合開発機構(NEDO)と次世代プリンテッドエレクトロニクス技術研究組合(JAPERA)は2017年10月2日、高精細で高感度な圧力センサーと、これをロボット・スキンに応用するシステムを開発したと発表した。なでる、叩く、揉むなどのさまざまな触覚動作をロボットに認識させることができる。
ロボットに人間と同じような触感を付与するためには、ロボットのボディに沿わせることができる柔らかい面状のセンサーが望まれる。またその位置と力加減や変化が瞬時に判断できるように、高精細で高感度なセンサーが必要となる。
今回JAPERAがNEDOの「次世代プリンテッドエレクトロニクス材料・プロセス基盤技術開発」プロジェクトにおいて開発した圧力センサーシートは、センシングする点それぞれにスイッチングトランジスタを持つアクティブマトリックスだ。従来のパッシブマトリックスに比べ、センシングする点の密度を高くしても高い階調数を保つことができ、高精細化と高感度化を実現している。
このアクティブマトリックスの有機薄膜トランジスタ(OTFT)は柔らかなフィルム上に全て印刷プロセスで形成でき、柔らかく面状のセンサー形成を実現する。また、印刷プロセスは従来のフォト・リソプロセスに比べ大幅なプロセス簡略化が期待できるとともに、真空プロセスが不要なため、製造施設の省スペース化や使用材料の省資源化が可能となる。さらに、材料塗り分けによる多機能化も期待できる。
また、今回開発した圧力センサーシートはフレキシブルフィルム上に構成したものだが、基材フィルムをストレッチャブル素材に替えることで、さまざまな3次元曲面への対応や、メディカル用途での人体への応用が期待できるとしている。
今回開発したロボット・スキンシステムは2017年10月3日(火)~6日(金)に幕張メッセで開催されるCEATEC JAPAN 2017のJAPERAブースで展示される。