Photo: Melanie Gonick/MIT
米マサチューセッツ工科大学(MIT)のZhao教授らの研究グループは、3Dプリンターを使って磁場を利用して動くソフトロボットを作成したと発表した。
ソフトロボットに磁石を近づけると、瞬時に伸縮しながらクモのように動いたり、テーブルを転がったり、転がってきたボールをつかまえたりする。その様子はこちらのYouTubeで公開されている。
人体のように密閉された空間に入れても遠隔操作が可能なことから、生物医学などへの応用が期待される。研究成果は2018年6月13日の『Nature』に掲載された。
ソフトロボットには、ハイドロゲル、形状記憶ポリマー、液晶エラストマーを利用したものなどがある。しかし、反応の速さ、遠隔操作のしやすさ、人体への影響などを考えると、実用化に向けて課題が残されていた。磁性粒子を利用した研究は他にもあるが、磁化方向が一様で、単純な伸び縮みや曲げしかできていなかったという。
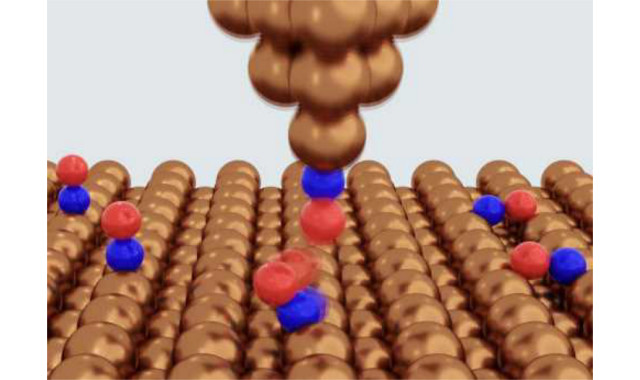
研究グループは、3Dプリンターのノズルの周りに電磁石を取り付け、微小な磁性粒子を含んだインクを使用し、プリント時にインク内の磁性粒子が一定の方向に向くようにした。電磁石の方向を変えれば磁性粒子の磁化方向も変わる。さまざまな磁化方向を持った「セクション」や、別々の磁化方向を向くセクションを持つ「ドメイン」の形成が可能になった。外部磁場にさらされると、ドメイン内のそれぞれのセクションが個別に動き、ソフトロボット全体が複雑な動きをする仕組みだ。
また、作成したソフトロボットが磁場中でどのように変形するかを予測する物理モデルも開発した。材料の弾性、ドメインのパターン、外部磁場の印加方法を考慮して、ソフトロボット全体の変形や移動の様子を予測できるようになった。物理モデルによる予測が、実験で作成したソフトロボットの動きとよく似ていることを確認しており、3Dプリンターと物理モデルを利用して、ソフトロボットの設計・検証・作成ができるという。
YouTubeの冒頭で紹介されているクモのような形のもの以外にも、電気回路と赤と緑のLEDライトを組み込んだリングも作成した。外部磁場の方向によって、リングは赤か緑に点灯するように変形する。素早く2方向に拡大・縮小するものなど、複雑な形状も作成した。
Zhao教授によると、今回開発した技術は、血液循環の制御、消化管内の撮影、組織サンプルの採取、閉塞の解消、指定場所への薬のデリバリーなどに役立てられる可能性があるという。
関連リンク
Magnetic 3-D-printed structures crawl, roll, jump, and play catch
Printing ferromagnetic domains for untethered fast-transforming soft materials