東北大学らは2018年10月25日、炎の中の高温でとがった物体、複雑形状物や脆弱物体など、さまざまな物体をつかめるロボットハンドを開発したと発表した。数珠状の指を放射状に配置し、さらに数珠のピースを金属素材にすることで高い耐切創性や耐火性、柔軟性を実現。物体を包み込むようにしてつかむことで、対象やロボットハンド自身を傷つけることなく作業できる。
災害からの復旧支援において、ロボットハンドはバルブの開閉や瓦礫の把持/運搬など環境と接触する作業で用いられるため、その機能や性能が作業の可否を左右する重要な要素となる。これまで開発された袋型のロボットハンドは、さまざまな形状の物体をつかむことができる一方、ゴムや布の耐熱性が低く、プラント爆発後の火災現場などで灼熱の瓦礫をつかむのは非常に困難だった。
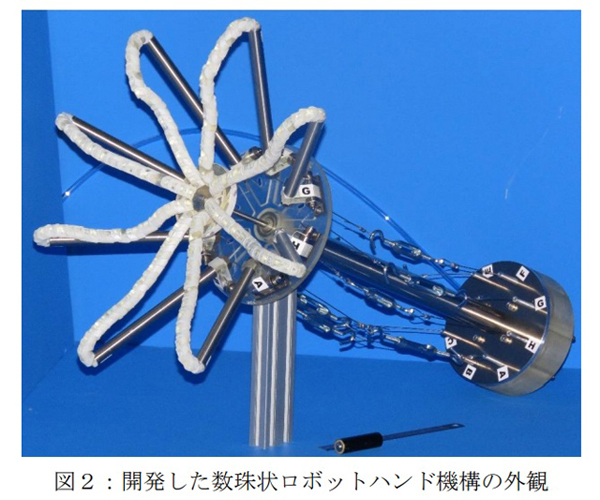
同研究グループは、形や大きさが不揃いな物もつかめる数珠状の構造を有する線状機構(1次元ジャミング機構)を複数有するロボットハンドを開発。内部のワイヤーを引くことで、数珠玉同士が接触力を高めて指全体が硬化するため、従来の袋型構造のように「破れる」という現象自体がない。
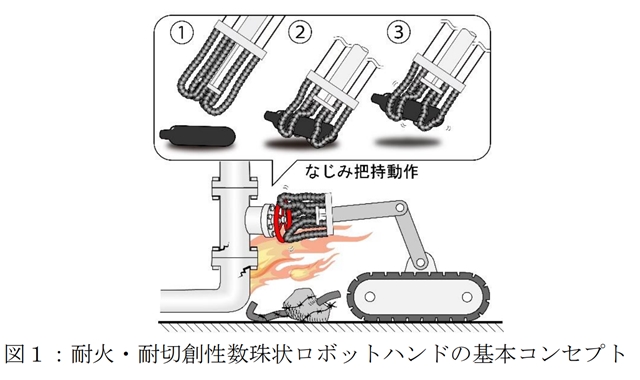
さらに、布やゴム素材を使用しない金属性部品で構成できるため、灼熱の環境下で破損したバルブ、不定形な割れたガラス類や、建築用で飛び出た釘類などの物体をつかむことができる。放水銃をロボットハンドの中央に設けることで、瓦礫や扉/蓋をこじ開け、先の火元へ直接消火剤を吹きかけて迅速かつ確実に消火を促す機器への展開も考えられるという。
今回の成果により、つかめる物体の範囲が拡大されるため、プラント爆発後などの火災現場だけではなくゴム素材を用いることが困難な原子力発電所内での作業でも活躍が期待できる。また、一つのロボットハンドで、さまざまな形の物をつかめるため、多品種少量生産の現場で必要な、多種多様な複雑形状部品の把持や組み立て、搬送作業への適用も期待できるとしている。