東京工業大学とブリヂストンは2017年1月26日、東京工業大学の鈴森康一教授とブリヂストンの櫻井良フェローらの研究チームが、内閣府ImPACTタフ・ロボティクス・チャレンジの一環として、油圧で駆動し大きな力を発揮する「ハイパワー人工筋肉」の開発に成功したと発表した。
研究チームは今回、優れた耐油性と変形特性を持つゴム素材を新たに開発するとともに、高張力の化学繊維の編み方を工夫し、高圧に耐えうるチューブ端末締め付け技術の開発に取り組んだ。その結果、1)高い耐衝撃性と耐振動性を備え、2)作業に応じてなめらかに動作でき、3)高い油圧を効率よく力の発生に変換できる——という軽量なハイパワー人工筋肉の開発に成功したという。
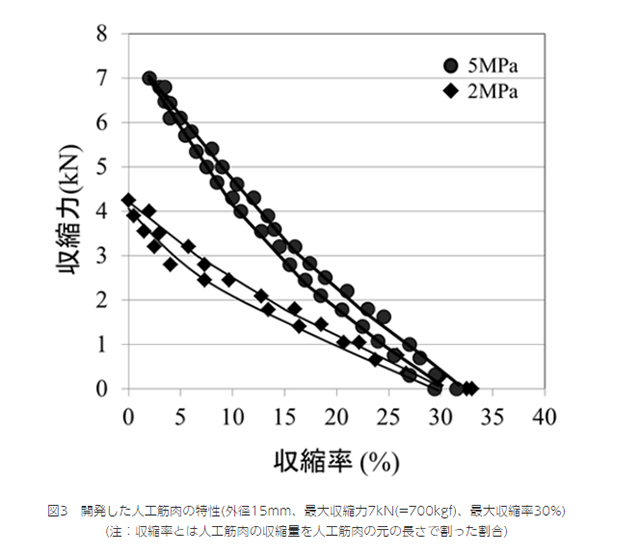
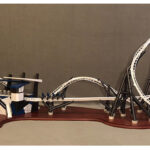
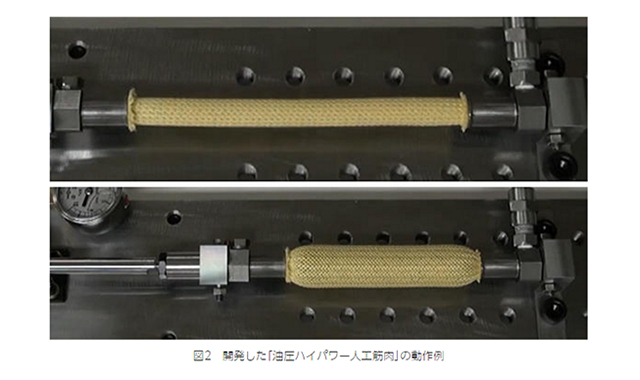
開発されたハイパワー人工筋肉は、「マッキベン型」と呼ばれるタイプのものだ。通常のマッキベン型人工筋肉は、0.3~0.6MPa(≒3~6kgf/cm2)の空気圧で動作する。だが、ハイパワー人工筋肉では、通常のマッキベン型よりもはるかに高い5MPaの油圧による駆動が可能。そのため、軽量であることも相まって、従来の電気モータや油圧シリンダに比べ、約5~10倍の大きな「力/自重比」を発揮できる。
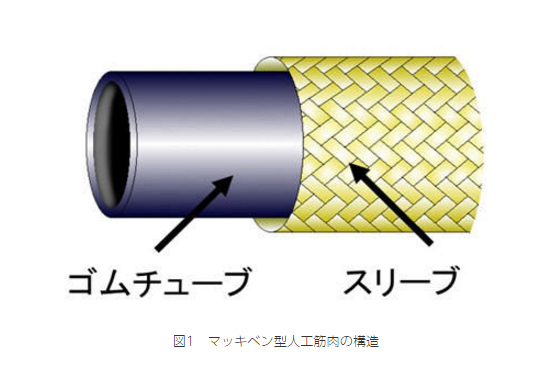
また、高耐久性・高耐油性に優れたゴムチューブが採用されたため、外部からの激しい衝撃や振動に対して頑強だ。インパクトドリルを使った壁の穴あけ作業や、コンクリート壁の斫り(はつり)作業など、従来の電気モータで駆動されるロボットでは困難な、衝撃の加わる作業に対応できる。さらに、ゴムチューブの周囲には高張力繊維のスリーブが編み込まれているので、微妙な力の制御が必要な作業も丁寧にこなせる。
研究チームは今後、ハイパワー人工筋肉を用いて、災害などの厳しい環境下で活躍するタフなロボットの開発・実用化を進める。また、同人工筋肉をさらに高性能化することで、産業用・家庭用ロボットへ活用する道も開いていくとしている。