- 2016-1-22
- ニュース, 製品ニュース
- Adams, EHA, エムエスシーソフトウェア, リニア・アクチュエータ, ロボット, 並列リンク機構, 九州産業大学, 小型シリンダー
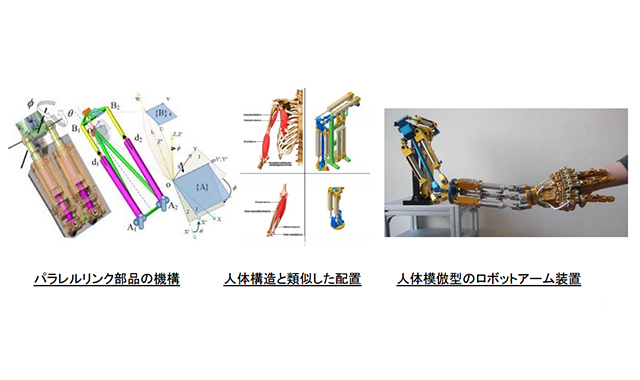
エムエスシーソフトウェアは2016年1月19日、九州産業大学工学部バイオロボティクス学科の李 湧権(リ ヨンクォン)准教授が、同社の汎用機構解析ソフトウェア「Adams」を活用し、人体模倣型の二足歩行ロボットやロボットハンドおよびロボットアームを開発したと発表した。
二足歩行ロボットは、全長が120cmで重量が45Kg。100W以下の低電力で安定した歩行が可能だ。ロボットハンドは600gほどの軽量でありながら、50N以上の把持力を発揮。また触覚センサからの信号をベースに、きめ細かな制御が行える。ロボットアームは1.5Kgと軽量だが、5Kg以上の重量をハンドリングできるという。
ロボットの駆動メカニズムには、筋肉のような動きを再現するために「リニア・アクチュエータ」を利用したほか、一般的なロータリータイプの機構に比べて4倍近くの出力を発揮する「並列リンク機構」を採用した。同アクチュエータは、独自に開発した超小型・電動式のもの、および電気油圧で駆動する小型シリンダー(EHA)の2種類がある。ロボットハンドやロボットアームについては、軽量化や小型化のために超小型の油圧発生装置を独自に開発した。
李 湧権准教授は、アクチュエータを含む駆動装置やリンク機構の設計や解析に加え、ロボットのモーション制作や制御にもAdamsを活用したという。同氏は「ロボットの開発は複雑な機構の設計や複雑なモーションの解析、制御など、時間と労力のかかるプロセスが多いのですが、Adamsは時短と効率化を図る上で、最高のツールであると思います」とのコメントを寄せている。
.jpg)