- 2023-7-26
- 技術ニュース, 機械系, 海外ニュース
- Amir Patel, Atlas, Boston Dynamics, Kemba, ケープタウン大学, チーター, ニューマティクス(空気圧), バイナリーバルブ, フォームファクター, ロボット工学者, 力学, 学術, 機械的コンプライアンス, 油圧アクチュエーター, 解剖学的構造

Christopher Mailer/YouTube
チーターは、狩りをする時には驚異的な瞬発力と速度を発揮する。ケープタウン大学のロボット工学者たちは、チーターの解剖学的構造と力学の細部を研究し、ロボットにチーターのような性質を持たせようとしている。
電気モーターは、安全で軽快な動作に必要な制御機能を備え、ロボットの手足を制御する簡単でコンパクトな方法を提供し、歩行ロボットを普及させる主要な役割を担っている。しかし、モーターでは生体の筋肉の性能に匹敵するような瞬発力を発生させることが難しい。これが、現在最もパワフルでダイナミックなロボットと言われるBoston Dynamicsの「Atlas」が、油圧アクチュエーターを採用している理由である。
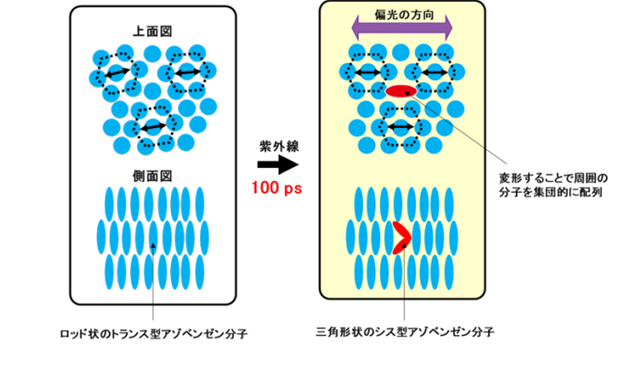
南アフリカのケープタウン大学のロボット工学者たちは、チーターの高速運動に触発され、ニューマティクス(空気圧)の実験を開始した。作動流体として液体の代わりに気体を使用することで、油圧式にはない機械的コンプライアンスを実現し、比較的シンプルで安価なフォームファクターで高い強度対重量比を得ることができるという。
ケープタウン大学准教授のAmir Patel准教授は、空気圧がもたらす急加速と操縦性を探求するために、モーターと空気圧を使用したハイブリッドの歩行ロボット「Kemba」を製作した。Kembaの腰には、高トルクの準ダイレクトドライブモーターが組み込まれており、正確な位置決めが可能で、膝には高出力の空気圧ピストンが取り付けられている。モーターは精密な制御を行うが、ピストンはシンプルで安価なバイナリーバルブによって制御され、オンオフ型アクチュエーターとして動作する。ここでのコンセプトは、空気圧を瞬発的な作動に使用し、腰の電気モーターからより細かい制御を得ることだ。
ブームで支えられた重さ7キロのKembaは、0.5メートルまで繰り返しジャンプすることができ、最大ジャンプの高さは1メートルに達するという。「Kembaでは静止状態からの急加速や、高速歩行に入った後の静止といった、運動の一時的な段階に焦点を当てていますが、ほとんどの論文ではこのような運動にはあまり焦点を当てていません。もっと多くの研究室がこの分野の結果を発表し、私たちが比較できるデータを持てるようになることを期待しています」と、Patel氏は語っている。
関連情報
African robotics developing in leaps and bounds | UCT News
Pneumatic Actuators Give Robot Cheetah-Like Acceleration – IEEE Spectrum