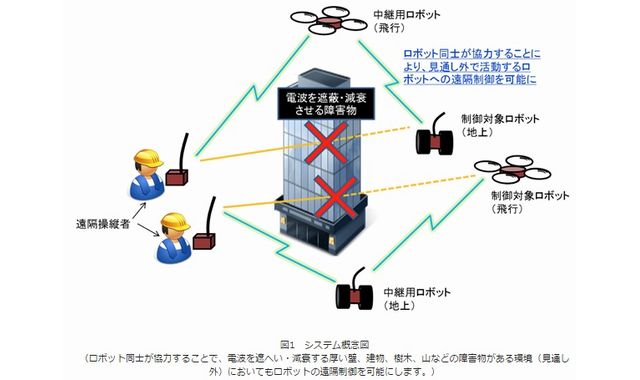
情報通信研究機構(NICT)、産業技術総合研究所、科学技術振興機構は2016年7月25日、電波が直接届かない場所(見通し外)にあるロボットを他のロボット経由で遠隔制御、および状態監視(テレメトリ)する通信技術を発表した。
NICTらは、同通信技術を開発するに当たって無線LANなど既存の通信方式を根本から見直し、通信信号をやりとりする時間のタイミングを制御局-中継局間、中継局-中継局間、中継局-ロボット局間などの各経路に対してあらかじめ割り振る「時分割多元接続」方式を採用したという。
従来型の通信方式では中継経路の探索や設定などが、端末の位置が変化しないことを前提になされている。そのため、中継経路が切り替わるたびに通信が切断され、ロボットが操縦不能になりかねない。
一方、時分割多元接続方式は、異なる経路を経由して受信される信号をすべて受信し、受信側にてどちらか強い信号だけを受け取る。これにより、中継局経由の応答遅延時間を、今回の開発装置では制御データの送信周期である50ミリ秒以内に抑え、中継経路がロボットの移動によって変更された時に発生する通信の切断をなくすことができたという。
NICTらは中継装置を搭載したドローンを高度約20~30mでホバリングさせ、操縦者の見通し外にある小型四輪ロボットの遠隔制御とテレメトリ信号受信に成功した。ドローン経由で他のロボットを制御し、中継経路が途中で切り替わっても通信を切断させない技術は、世界でもまだ実現した例がなかったという。