- 2020-6-11
- 技術ニュース, 機械系, 海外ニュース
- Leveraging Elastic instabilities for Amplified Performance, PoC(コンセプト実証), Science Advances, ソフトロボット, チーター, テンプル大学, ノースカロライナ州立大学, 生物力学(バイオメカニクス)
チーターの生物力学(バイオメカニクス)に着想を得て、固体面や水中で従来よりも速く移動できる新しいタイプのソフトロボットを開発した。この研究は、ノースカロライナ州立大学、テンプル大学などによるもので、2020年5月8日、『Science Advances』に掲載された。
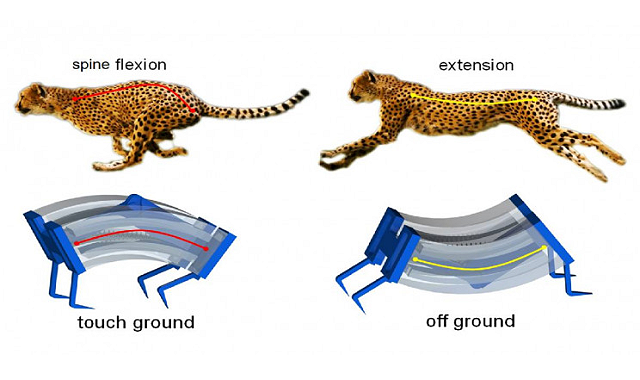
一般的に固体面を這いながら進行するソフトロボットは、常時固体面と接触しているため、その移動速度は限定的になる。今回開発されたソフトロボットは、地上最速の生き物であるチーターにヒントを得て作られており、チーターの速度と力はその脊柱の湾曲から得られている。
LEAP(Leveraging Elastic instabilities for Amplified Performance:性能向上のため弾性不安定性を活用)と名付けられたこのロボットは、ばねで動く双安定性の脊柱を持つ。シリコーン製のロボットにつながるチャネルに空気を送り込むことで、「touch ground」と「off ground」という2つの安定した状態をすばやく切り替えられる。状態の切り替えにより多くのエネルギーが解放され、ロボットは地面に対し素早く力を加える。そして足は地面を蹴り、ロボットはチーターのようにギャロップ(駆歩)することができる。
LEAPの体長は約7cm、重さが約45gで、約3Hzの周期で毎秒最大で体長の2.7倍の距離を移動する。これは、従来最速のソフトロボットが体長の0.8倍程度だったことに比べて3倍以上速く、しかも急な傾斜を走り上がることもできる。足の代わりにフィンを取り付けたLEAPは、毎秒体長の0.78倍となった。
また、ロボットが行使する力を調整することで、卵のように繊細な物体をそっと掴んで持ち上げたり、重さが10kg以上の物体を十分な強さで掴んで持ち上げたりもできた。
研究チームは、今回の研究はPoC(コンセプト実証)の役割を果たし、設計変更により高速で強力なLEAPを作成できるとしている。潜在的な応用としては、スピードが不可欠な捜索救助技術や、産業用製造ロボット工学などが考えられている。