- 2022-12-2
- 技術ニュース, 機械系, 海外ニュース
- E-Walker, LAST, Lincoln大学, ジェームス・ウェッブ宇宙望遠鏡, ハードウェア・イン・ザ・ループ, 自律歩行ロボットシステム, 風力発電タービン
宇宙ミッションで地球軌道上を周回する構造物は巨大化が進み、将来、現在の宇宙ステーションやジェームス・ウェッブ宇宙望遠鏡よりもはるかに大規模なインフラが必要になる。同時に、それらを宇宙空間で建設するミッションの数が増加する。
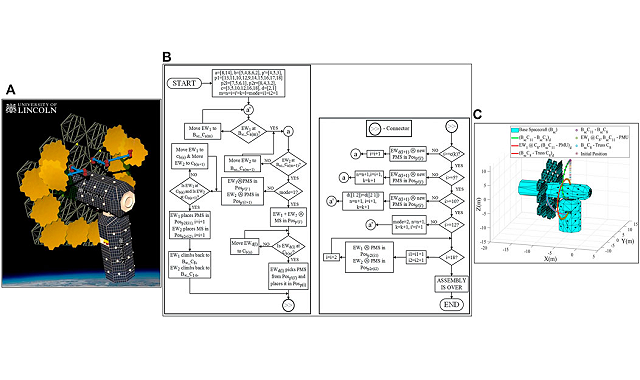
英Lincoln大学の研究者は、軌道上での組立ミッションで運用する自律歩行ロボットシステムの検討結果を、2022年10月4日付けの論文で発表した。この論文では、ロボットのユースケースを直径25mの大口径宇宙望遠鏡「LAST」の建設ミッションと設定して、歩行型ロボット「E-Walker」の機構や寸法要件を考察した。
E-Walkerの構造は、LASTの設計情報と宇宙船プラットフォームの仕様を分析して検討した。その結果、肘関節で接続した2本のアームを持ち、両端で手と脚の役割を交互に入れ替えながら構造物上を移動し作業できる、7自由度の機構が最適と結論付けた。
論文は、試作状況にも言及した。実寸の設計に加えて、6分の1にスケールダウンした試作機の設計と構造解析にも言及した。試作機の用途は、地上でのサービス、メンテナンス、組み立て作業が理想的だと分かった。一例として、3次元空間を様々に移動できる特性を活かして、風力発電タービンの定期点検への用途がある。
今後は、LASTのミッションに向けて、実寸のE-Walkerの設計仕様を決定する。あわせて、スケールダウン版の試作機は、シミュレーション系と結合したハードウェア・イン・ザ・ループの実験に進む計画だ。
関連リンク
Design engineering a walking robotic manipulator for in-space assembly missions