東京工科大学は2023年7月24日、トンボが逃げる際に行う機動的な飛行の流体力学メカニズムを解明したと発表した。同大学によると世界初となる。
飛翔能力を持つ昆虫の多くは、羽ばたき運動、サイズなどの特性から、人工飛行体と比べて粘性力が支配的な低レイノルズ数領域で優れた飛行性能を有する。この特徴は、小型飛行ロボットの飛行指針としても注目されている。その中でもトンボは、他の昆虫とは違い、前翅と後翅を独立して制御できるという優れた特性を持つ。
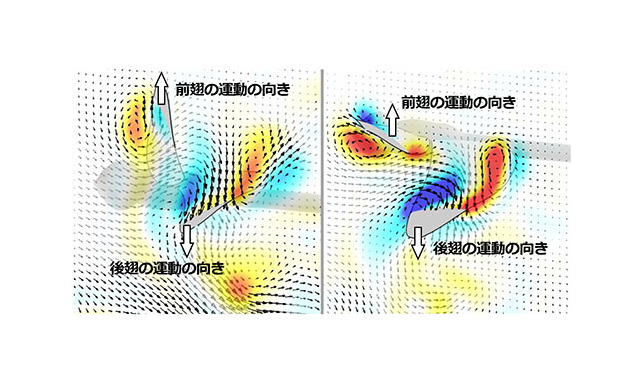
今回の研究では、トンボの通常飛行時の翅の運動と、逃走的機動飛行時の翅の運動がどのような空気力を生み出すのかを数値シミュレーションした。その結果、逃走飛行時には、通常飛行時と比較して後翅を流れに対して大きく傾かせて迎角を大きくし、飛行効率を犠牲にして局所的な空気力を増加させていることが分かった。さらに、前翅と後翅の羽ばたくタイミングを上手く変更することで、前翅の羽ばたきで発生する空気の流れを利用して、後翅の表面に生じる空気力生成に寄与する渦の安定化を促していることも示唆された。
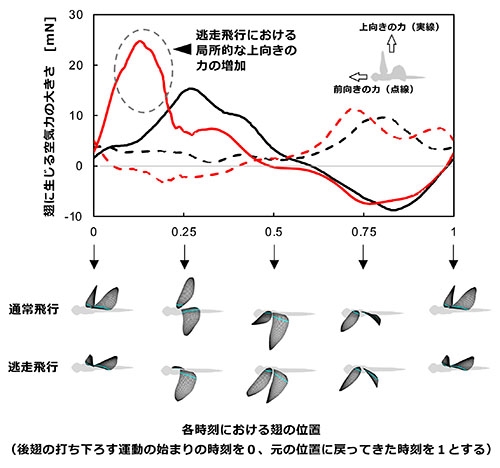
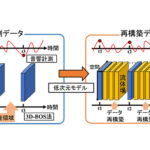
羽ばたく運動中に翅に生じる空気力の大きさ。黒線が通常飛行、赤線が逃避飛行を示す。逃走飛行においては、上向きの力が局所的に大幅に増加している。
今回の研究により、従来とは異なる新たな流体力学メカニズムによって、逃走のために局所的に空気力を増加している可能性が示された。今回の研究は、より安全性や静音性の高い羽ばたき型飛行ロボット実現のための設計指針となり得る重要な要素だという。
関連情報
トンボの優れた機動飛行の流体力学メカニズムを解明 高性能な羽ばたき型飛行ロボットの創出に期待 | 2023年のプレスリリース | プレスリリース | 東京工科大学