- 2024-5-21
- 技術ニュース, 機械系, 海外ニュース
- Hao Wu, National Science Review, センシング能力, フレキシブルセンサー, ポアソン比ゼロ, ポリジメチルシロキサン膜, マニピュレーター, 二次元方向, 多次元方向, 学術, 華中科技大学
CREDIT: ©SCIENCE CHINA PRESS
中国・華中科技大学の研究チームが、多次元方向の刺激を独立して知覚できる、ポアソン比ゼロのフレキシブルセンサーを開発した。同センサーを使用したロボットのマニピュレーターは、つかむ物体の変形に関係なく、物体との接触力を正確に計測し、力や運動状態、ひずみを正確に検出できる可能性がある。
この同研究成果は2024年1月23日、『National Science Review』誌に掲載された。
最近10年でフレキシブルセンサーのセンシング能力は急速に向上したが、多次元方向の刺激に独立した知覚力がないため、多次元方向からの力やひずみに起因する複雑な変形の測定が困難であった。センシング材料に力が加わると、力の方向と同じ縦方向に縮み、横方向に伸びるポアソン効果が働くため、二次元方向の刺激を独立して知覚する際の障害となる。
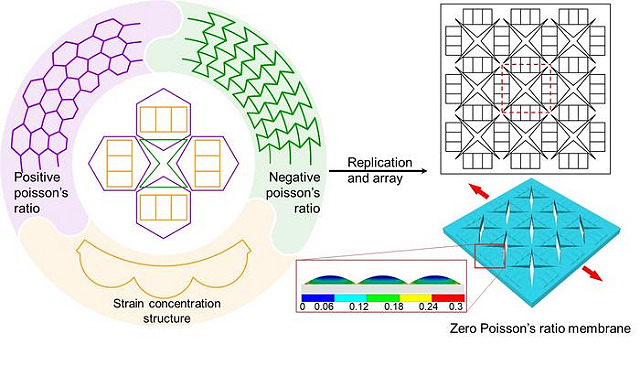
そこで研究チームは、縦方向のひずみ下で横方向幅を一定に保つ、ポアソン比ゼロの材料開発に取り組み、正のポアソン比を持つ六角形構造と、負のポアソン比を持つ凹型構造を綿密に組み合わせたハイブリッド構造を構築した。有限要素法によりハイブリッド構造のポアソン比を計算した結果、ポアソン比0.43のポリジメチルシロキサン膜は、同構造でポアソン比0.07に減少することが分かった。
同構造をベースとしたフレキシブルセンサーを一方向に延伸すると、センシングユニットの延伸方向に沿った電気抵抗は線形に増加したが、延伸方向に垂直な方向の電気抵抗はほとんど増加しなかった。特定の方向に沿ったセンシングユニットは、対応する方向の引張ひずみにのみ反応したため、多方向の刺激を独立して検出できる可能性が示された。
華中科技大学のHao Wu教授は、「ポアソン比ゼロのセンサーは、ヘルスケアやヒューマン・マシン・インターフェース、ロボットの接触感覚として応用できる可能性があります」と説明した。