

タグ:実時間最適制御
-
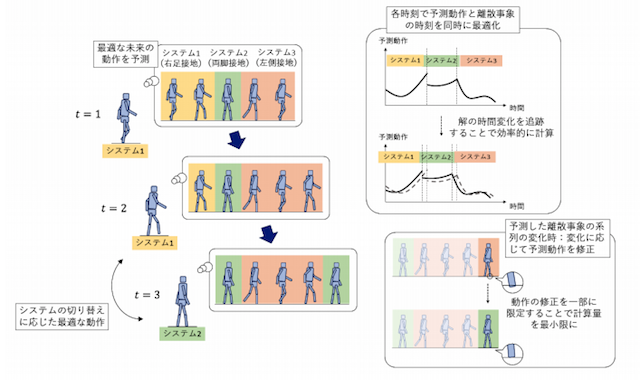
離散事象を伴うモデル予測制御の高速アルゴリズムを開発――2足歩行ロボットなどの性能を限界まで引き出すことが可能に 京都大学とトヨタ
京都大学は2019年11月12日、トヨタ自動車と共同で、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル予測制御)を可能にする高速アルゴリズムを開発したと発表した。 刻々と変化する状…詳細を見る-
-

2024-11-18
構造デザインで磁性材料の横型熱電変換性能を向上させる手法を開発 NIMSと東大
2024-11-19
2千時間の連続運転後も効率の95%を維持する、高効率ペロブスカイト太陽電池を開発





Copyright © fabcross for エンジニア All rights reserved.