

タグ:離散事象
-
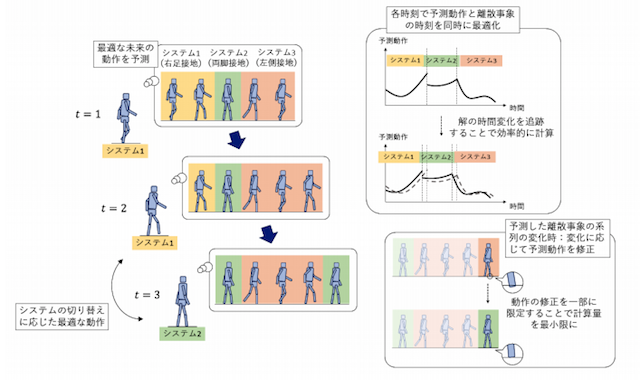
離散事象を伴うモデル予測制御の高速アルゴリズムを開発――2足歩行ロボットなどの性能を限界まで引き出すことが可能に 京都大学とトヨタ
京都大学は2019年11月12日、トヨタ自動車と共同で、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル予測制御)を可能にする高速アルゴリズムを開発したと発表した。 刻々と変化する状…詳細を見る-
-

2024-11-18
核融合炉にボロンを「食卓塩のように振りかけて」出力損失を止める研究
2024-11-20
熱を発し自己修復もするサステナブルなコンクリートを開発――道路の除雪や除氷に期待





Copyright © fabcross for エンジニア All rights reserved.