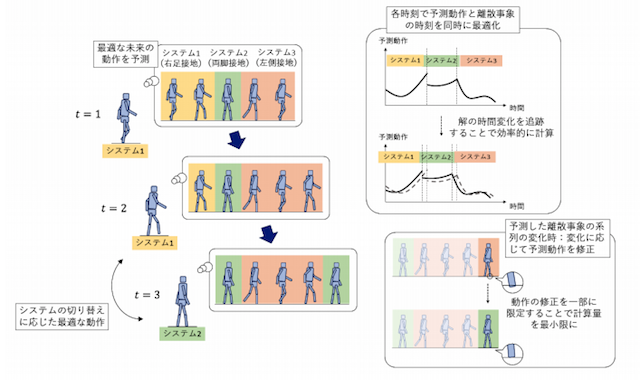
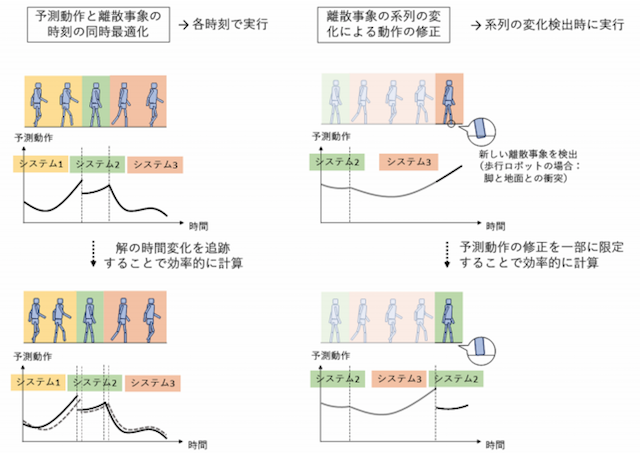
モードの切り替えを伴うモデル予測制御の例
京都大学は2019年11月12日、トヨタ自動車と共同で、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル予測制御)を可能にする高速アルゴリズムを開発したと発表した。
刻々と変化する状況に応じ、最適な未来の動きをリアルタイムで計算しながら制御を行う方法をモデル予測制御という。自動運転車などは、このモデル予測制御により、状況の動きに応じて動きを修正し、最適な経路を見つけている。
しかしモデル予測制御において、制御対象のモデルが離散事象を伴う場合、最適制御問題に場合分けが生じ、計算が膨大になる。例えば、地面と足の接触に応じて速度が不連続に変化し、運動方程式が切り替わる2足歩行ロボットなどが挙げられる。従来は、このような対象のモデル予測制御は困難だった。
離散事象を伴うモデル予測制御における最適制御問題では、全ての離散事象の組み合わせについて最適な動作を計算した上で最も良い組み合わせを選択することが望ましい。だが、計算時間の観点から非現実的だ。そこで研究グループは、離散事象を含む最適な予測動作全体の計算と、予測した離散事象の系列の変化に応じた部分的な動作の修正を組み合わせ、効率的な計算を行うアルゴリズムを提案した。
提案手法
研究グループが提案したアルゴリズムでは、初期状態が少しずつ変化するとき、予測した離散事象の組み合わせと最適な動作も少しずつ変化することに着目している。このアルゴリズムでは、最適な予測動作と離散事象の起こる時刻を、その時間変化を追跡することで効率的に計算する。
ただし、このアルゴリズムでは、予測した離散事象の系列が一定のもとで計算する。この計算に加え、算出した最適な予測動作のもとで、現在予測している離散事象の系列に変化があるかどうかを調べる。離散事象の系列の変化を検出したときには、予測動作を部分的に修正し、効率的に動作修正の計算を実行する。
今回提案したアルゴリズムによって、離散事象を含むさまざまな制御システムへモデル予測制御が適用できるようになり、それらの性能を限界まで引き出せるようになる。特に、地面や壁、モノと触れ合うようなロボットの知能や運動性能を高めることが期待できるという。