- 2021-1-20
- 技術ニュース, 機械系, 海外ニュース
- Amsterdam Institute for Advanced Metropolitan Solutions(AMS Institute), GPSセンサー, International Conference on Intelligent Robots and Systems(IROS), LAM(Simultaneous Localization and Mapping)アルゴリズム, LiDAR, Roboat II, マサチューセッツ工科大学(MIT), 学術, 慣性計測ユニット, 自動運転ボート
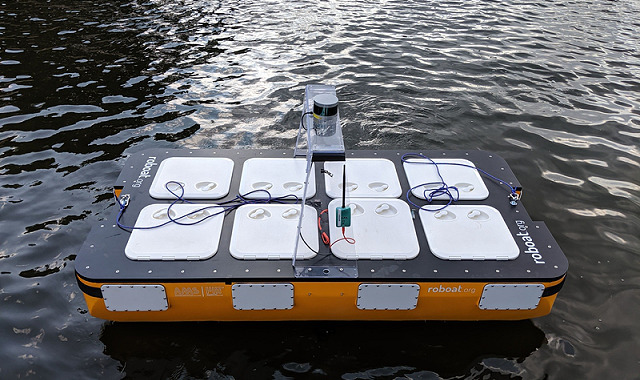
米マサチューセッツ工科大学(MIT)は、2020年10月26日、人間の運搬もできる自動運転ボート「Roboat II」の開発に成功したと発表した。オランダの首都アムステルダムの運河で実際に人間を乗せて運行も行ったという。研究成果は、2020年10月25日からオンライン開催された国際会議「International Conference on Intelligent Robots and Systems(IROS)」で発表された。
先行研究では、小さい荷物を運ぶことができる全長1mの自動運転ボートが開発されてきたが、人間を乗せるには小さすぎた。今回発表されたRoboat IIは重量50kg以上で全長2mだ。実証実験で、Roboat IIは運河を3時間にわたって自律的に航行。誤差わずか0.17m以下でスタート地点に戻ってきた。Roboat IIは2分の1スケールで製作されており、現在はフルモデルサイズで4~6人の人間を乗せることが可能な全長4mのボートをアムステルダムで製造中だという。
研究者らは、オランダのAmsterdam Institute for Advanced Metropolitan Solutions(AMS Institute)と共同で、ボート間の通信および協調を改良した航行制御アルゴリズムも開発してきた。開発されたシステムは、アリの群れがコミュニケーションを取らなくても食べ物を運ぶ方法にインスパイアされたものだ。具体的には、リーダーの役目をするボートのみ目的地を把握し、リーダー役のボートが目的地への移動を開始すると、他のボートはリーダー役のボートがどうするかを推定し、それに応じて動きを調整する。ボート間での直接通信は行わない仕組みで、リーダー役のボートが入力調整して他のボートを操ることもできる。研究発表時点では、このシステムは水上における慣性力や荷重といった水上車両独特の動きはまだほとんど考慮されていないようだ。
5年にわたる自動運転ボート研究は、輸送タスクを主眼にした開発段階にきているという。輸送時のタスクには、乗客のピックアップ、Roboat IIの位置把握、障害物の発見と回避がある。乗客のピックアップは、特定の位置にいるユーザーからピックアップするよう指示が出されると、システムコーディネーターは乗客に最も近い無人ボートにタスクを割り当て、Roboat IIは交通状況に基づいて目的地までの航行可能経路を作成する。次に、Roboat IIは、自己位置推定と地図作成を同時に実行するSLAM(Simultaneous Localization and Mapping)アルゴリズムを使用し、LiDAR、GPSセンサー、慣性計測ユニットの情報からRoboart II自身の位置を特定。その後、コントローラーが経路上の障害物を回避するように最初に作成された経路を更新していき、Roboat IIは目的地まで航行する。
研究者らは、プロジェクトの最終目標の1つに、運河でのごみ収集、物の運搬、人の輸送などの作業を自己組織化して完結できるようにすることを掲げている。今後は、機械学習を利用して、自動運転ボートの主なパラメーターをオンラインで推定することを計画しているようだ。さらに、ボートの上に物体が置かれたときに構造を動的に変化させる適応制御装置の開発も進めていくという。最終的には、運河だけではなく、潮流や波などの大きな外乱が存在する屋外の水環境での航行も目指すとしている。