- 2019-1-31
- ニュース, 技術ニュース, 機械系
- NEDO, インボリュート曲線, テクニカルショウ ヨコハマ2019, バイラテラル・ドライブ・ギヤ, ロボット, 新エネルギー・産業技術総合開発機構, 横浜国立大学, 減速機, 複合遊星歯車機構
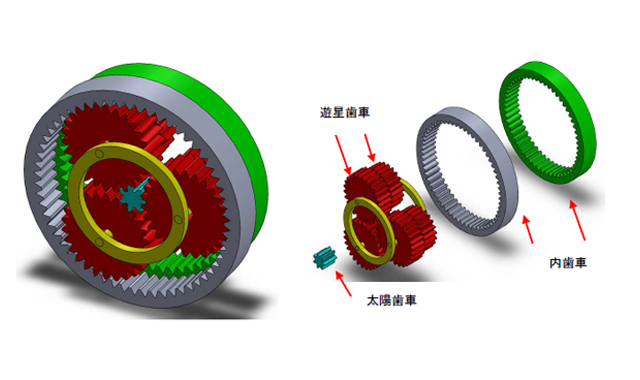
バイラテラル・ドライブ・ギヤの構造
新エネルギー・産業技術総合開発機構(NEDO)と横浜国立大学は2019年1月30日、従来不可能であった100:1の減速比でも逆駆動が可能となるギヤ「バイラテラル・ドライブ・ギヤ」を開発したと発表した。

逆駆動可能なバイラテラル・ドライブ・ギヤ
人とロボットが共存する社会では、人とロボットの接触により危険が生じるおそれがある。そして、その危険は、ロボットの関節に使用されている減速機の逆駆動性が弱く、接触の衝撃を吸収できないことからきていた。さらに、減速機は、古くから研究されてきたため、大きな改善の余地はないと考えられていた。
しかし、研究グループは今回、減速機の1つである複合遊星歯車機構の動力伝達効率を最大化する自動計算ソフトを開発。動力伝達効率を飛躍的に高めるとともに、設計を容易にすることに成功した。また、小型化/軽量化を図るとともに、各歯車形状を最も多く使われているインボリュート曲線とすることで低コスト化も実現した。
そして、試作したバイラテラル・ドライブ・ギヤでは、減速比が102.1:1でありながら、順駆動動力伝達効率が89.9%、逆駆動動力伝達効率が89.2%という高い値を確認。従来の減速機と比べて、逆駆動動力伝達効率の約30%向上と、増速起動トルク(逆駆動トルク)の約1/300への低減を実現した。
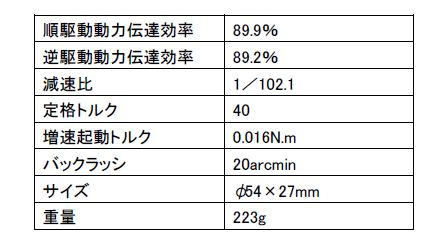
試作バイラテラル・ドライブ・ギヤの仕様
研究グループは、この成果により、ロボットの関節の柔軟化だけでなく、逆駆動による制動時のエネルギー回収(エネルギー回生)の効率化や、モーター情報による負荷トルクの推定が可能になるという。そして、それにより、小型軽量化/低コスト化/省エネ化を同時に実現できるため、協働ロボット、アシストロボット、移動ロボットなどの関節部材や、電気自動車(EV)の変速機などへの展開も期待できるとしている。
なお、バイラテラル・ドライブ・ギヤは、2月6日から8日までパシフィコ横浜で開催される「テクニカルショウ ヨコハマ2019」に出展する予定だ。