- 2020-1-30
- 制御・IT系, 研究・技術紹介
- DSP, TPIP3, ZV(Zero Vibration)法, カーネギーメロン大学, サスペンション, サンリツオートメイション, ポテンショメータ, ラジコンカー, 大同大学, 川福基裕, 自動車, 金出武雄
大同大学 工学部 電気電子工学科 川福基裕教授
よく運転が上手だとか下手だとかという言い方があるが、一般道を普通に運転する場合、上手、下手の基準は何だろうか。カーブでも安定して走れたり、止まるときにガクガクすることがなければ、乗っていても不快に感じることはないだろう。雪国の初心者であれば、雪道のカーブでハンドルを切っても車が思うように曲がらず、怖い思いをした経験もあるかもしれない。
自動車の運転技術はドライバーによって千差万別だろうが、誰が運転しても安全で乗り心地がよい自動車は、自動車の制御開発が目指すべき大きな目標の一つだ。今回は、大同大学工学部電気電子工学科で、ラジコンカーを使って「雪道を初心者でも安全に走れる車」の開発を目指す川福基裕教授にお話を伺った。
――主にどのような研究をされているのでしょうか?
[川福教授]大きく分けて二つのテーマがあります。一つは、ラジコンカーを使った車両の走行制御の研究、もう一つがハードディスクのヘッド位置決めを高精度に行うという研究です。現状はほとんどラジコンカーが中心なので、今回はそれを中心にお話します。
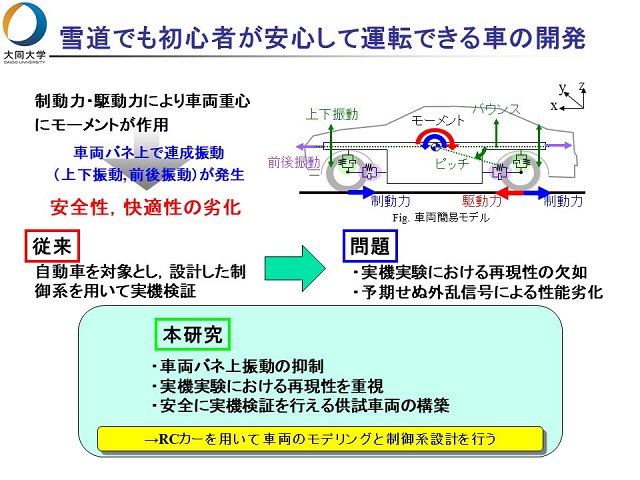
タイヤの駆動力制御技術を中心に、上下方向前後方向での振動を抑制し、乗り心地と操縦安定性の高い領域での両立を目指している
[川福教授]目指すところを分かりやすくいうと、「雪道を初心者でも安全に走れる車を作ること」になります。自動車の操縦安定性にはサスペンションが大きく関わっていますが、例えばバスに乗っているときに、運転がうまくないと前後に揺れたり、カーブを曲がるときに気持ち悪い感じがするといった経験をしたことがあると思います。これを、ドライバーの運転技量ではなく、自動車の制御で何とかできないか、という課題が背景にあります。
――確かに乗り物酔いしやすい車や運転がありますね。なぜ気持ちが悪い感じがするのかを数値化して、制御で改善しようということでしょうか?
[川福教授]人は、乗り物のゆらゆらした動き、特に10Hz以下(1秒間に10回)の揺れに対して気持ちが悪いと感じることが分かっています。自動車には路面から伝わる衝撃を緩和するためにサスペンションが使われていますが、このバネによって振動が起きます。この揺れをなくすための研究を、大学の研究室でも取り組みやすいよう、ラジコンカーを使って行っています。
ラジコンカーでリアルタイム画像の取得とステアリング制御を実現
――このテーマに取り組まれたのはいつ頃のことでしょうか。
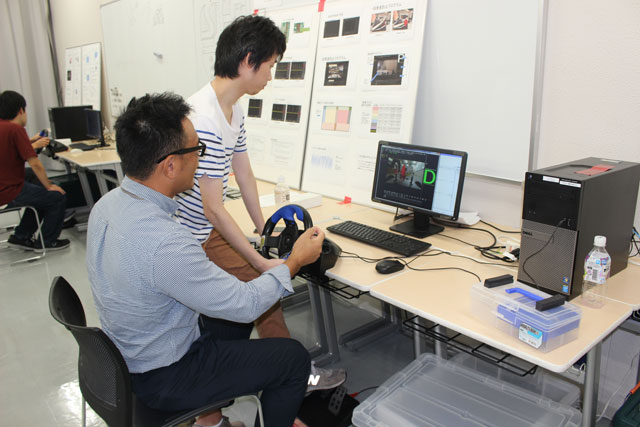
[川福教授]ラジコンカーを使って検討を始めたのは、着任した時ですので5年くらい前になります。遠隔監視と計測制御が1台でできるサンリツオートメイションの「TPIP3」というマイコンがあったので、それを使っています。元々はレスキューロボットなどの遠隔操作用に製品化されているものです。ラジコンカーで制御を検討する際、ラジコンカーに乗車している状態を想定し、その視界の画像をリアルタイムに見ながらハンドルを切る必要があります。それが最初の課題でしたが、このマイコンを利用することでうまく解決できています。もちろん、この規模であれば、有線でつないで高性能な「DSP(Digital Signal Processor:高速演算処理装置)」を使って処理するというのも可能だと思いますが、あまり面白くはないですよね(笑)
――自動車の揺れはドライバーが体感できますが、ラジコンカーで実験する場合、揺れはどのように測定されていますか?
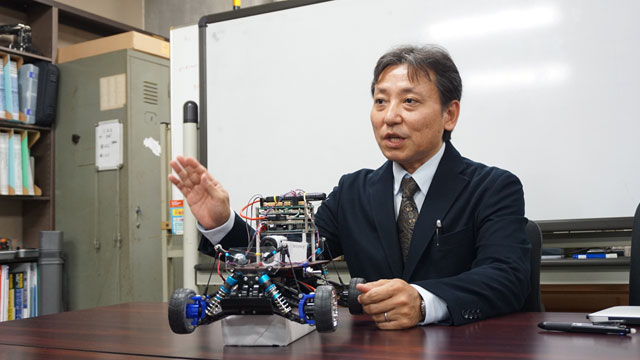
[川福教授]各タイヤの上下方向の動きをそれぞれ回転角に変換し、ポテンショメータを使って測定しています。実際の車両に使われているシステム、例えば車体の前後の傾きを検知してヘッドライトの光軸を自動で調整したり、前後のブレーキの圧力を調整したりするものがありますが、これと同じような構造ですね。
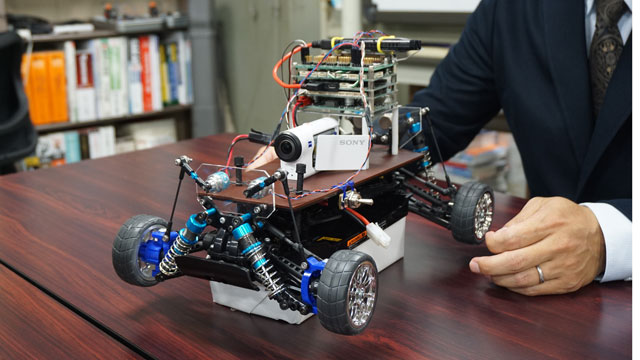
前後のサスペンションにリンクを追加し、ポテンショメータで動きを計測できるようにしている

[川福教授]これが実際の画像です。最初は1/8スケールのラジコンに積んでいましたが、大きすぎて運用も大変なので、今は1/10スケールにして、合計4台使っています。学生は3チームに分かれ、各チームで1台ずつ使用して課題に取り組んでいます。ラジコンは基本的に既製品をそのまま使っていて、ポテンショメータを取り付ける部分は自作しています。
――自動車の操縦安定性や乗り心地というと、サスペンションの構造やバネのチューニングといった領域になるのでしょうか?
[川福教授]サスペンションなどのメカ部分については構造で決まってしまうため、例えば駆動力をどう伝えるのか、という視点で制御方法を考えます。アクセルを踏んで加速するとき、自動車は前後方向に揺れます。これをピッチングと呼びますが、単に加速するだけだと、加速度が下がる時に前のめり方向に揺れ戻しが起きます。このとき、少しコンコンと再加速してやることで、揺れ戻しを打ち消して、ピッチングをなくすことができます。
――駆動力を使って、沈み込んだサスペンションが伸びる速度を緩やかにするということですね。
[川福教授]クレーンの振れ止めのような動きを、タイヤの駆動力でやるという考え方です。これはピッチ方向だけですが、曲がるときの揺れ(ロール)で気持ちが悪いと感じることもあります。旋回時にはタイヤに舵角が付いているわけですが、ステアバイワイヤ(注:ハンドルとステアリング機構をメカ的に分離し、モーターでステアするシステム)になってモーターで制御できるようになれば、舵角も振れ止めと同じように、ステアリング操作を一度止めて、ロールが戻る動きに合わせてハンドルをもう一度切ると、旋回時の揺れ戻しも少なくなります。
実際の自動車とは異なるラジコンカーならではの難しさがある
[川福教授]振動制御の一例をZV(Zero Vibration)法という手法をもとに開発しています。これは単位インパルス応答を行う制御対象に対して、その振動の半周期時点である大きさのインパルス入力を加え、それ以降の振動を抑制するものです。
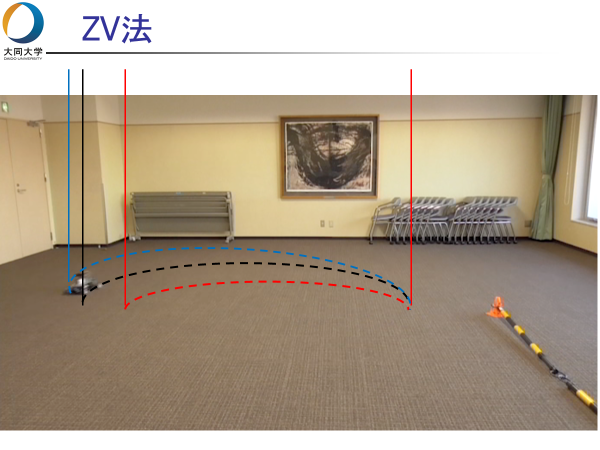
ドライバーが狙った軌跡(赤線)に対して、制御なしの青線は外側に膨らむアンダーステアを示しているが、振れ止め制御をいれると黒線まで近づいてくる
[川福教授]この理論や考え方はよく知られているもので、当研究室ではラジコンカーで実験機器を整えて、実際に制御をするとどうなるのかを確認している、という段階です。なかなか、思った通りのところに行ってくれないんですけど(笑)
黒い線でも、車の性能としてはよくない。それは、まだドライバーの狙ったところに行っていないからです。本来なら赤線をトレースするべきですが、自分が思った位置よりも外を回ってしまうアンダーステアが残っています。これをさらに赤線に近づけるためにはどのような制御にすればいいのか。力学モデルとして、加速度や角速度というレベルでどのように振る舞っているのかを検証しています。サスペンションの動きをフィードバックするだけでなく、ロールの角速度がどのように動いたらいけないのか、それをどう安定化するのか、別の次元で制御するにはどうするのか、を考える必要があります。
――理論的な解析と並行して、どうすればいいのかという対策を考えているということですね。かなり難しい領域だと思いますが、学生さんたちはどのように取り組まれているのでしょうか。
[川福教授]車体は市販のキットをそのまま渡していますが、プログラムについては、基本的なもののリストを渡して、それを改造して動かすようにさせています。学生は自分で調べながら2ヶ月くらいかけて操作できるようになりますが、そのうち物足りないと感じるところが出てきます。それを聞き出して、こちらの考えとマッチするものをやってみるように指導しています。
今は、加速度と角速度のセンサーを新たに搭載しようとしています。学生によっては、自分で使いやすいセンサーを調べてきて、載せるためにさらにマイコンを加えたり、エンコーダーをつけて速度をとれるようにしたら、というアドバイスをしたり。
無線車両の走行会の様子
[川福教授]毎年9月頃に近隣の研究室にも声をかけて、学生たちの研究講評をしてもらっています。ここでは自分の研究成果を学生自身が説明する機会を設けています。研究道具を触るだけではなくて、中身を知らないと研究者としてはダメですからね。良い意味で、遊びながら徐々に制御への理解を深めていこうという学生の意識が感じられます。
――チームごとに状況もゴールも違うのですね。研究テーマとしては毎年繰り返している形でしょうか?
[川福教授]ラジコンカーについては、学生が入れ替わるたびに一旦リセットして最初からやっています。教育的な視点から、まずソフトウェアをちゃんと使えるようにしよう、プログラムを勉強しようというところから始めて、実際に作って、プレゼンテーションもできるようにすることを目指しているからです。大学院に進む学生が増えれば学部4年から修士2年までの3年間ということで指導の仕方も変える必要がありますが、いまは修士課程に進む学生が少ないので、自分たちの力でちゃんと走らせて、制御のことも一通り実験するというワンサイクルを、1年で実施できるようにしています。
プロドライバーの運転技術を制御モデルとして実証したい
――自動車のバネ上振動の抑制について、取り組まれるようになったきっかけを教えていただけますか?
[川福教授]以前、自動車関連メーカーの方と一緒にテストコースを走行する機会があり、プロドライバーの運転でスラロームを走り、エンジンの出力制御を変えた時と変えない時の差を体験したことがあります。エンジンのトルク制御なので自動車のピッチ(前後に沈み込む動き)を変えているのですが、スラロームでのロール(左右の揺れ)も確かに違ってきます。しかし、これがなぜなのか分からない。確かに違いを体感できるのですが、データをみても良く分からない。これを明らかにするために、いろいろなところを改造しやすいラジコンで研究できないかと考えたのがきっかけです。
タイヤの駆動力の制御で前後のピッチをなくしたり、ロール方向の揺れ戻しを抑えたりすることはできますが、どこまで効果的なのかはまだ明確に分かっていません。もちろんラジコンカーを使う以上、まず実車と同じ振る舞いになっているのか、という確認から必要です。小さいボディに検証機器を搭載するため、マイコンと無線通信を用いているので、精度のいい制御はなかなか難しいですが、今はプロドライバーの官能評価に頼っているような制御の効果を、数式化できないかと考えています。将来的に自動車技術会などで発表するような場を持つことを当面の目標としています。
素人のように発想し、玄人のように実行する
――学生さんに対してメッセージをお願いします。
[川福教授]自動車の制御となると、ちょっと難しいと感じる学生が多いようです。本学の電気電子工学科で、メカの領域にまで手を広げているのは私の研究室だけなので、頭を柔らかくして学ぶ意欲が必要だと思います。難しくて分からないというのはいいんです。ただ、分からないということをちゃんと理解していることが大切です。
また、研究において肝心なことは、カーネギーメロン大学ワイタカー冠全学教授の金出武雄先生が述べているように、「素人のように発想し、玄人のように実行する」ことです。素人の発想でいいから自分でアイデアを出すように言っています。そして、エンジニアという職のプロになるなら、プロとしての目線でどのように解決できるのかを考えてほしいと思います。
関連リンク

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。