- 2020-2-14
- 制御・IT系, 技術ニュース, 海外ニュース
- Sharon Di, Transportation Research Board(米国交通運輸研究会議)第99回年次総会, ゲーム理論, コロンビア大学, ドライバー, モラルハザード(倫理観の欠如), 学術, 自動車メーカー, 自動運転車, 自動運転(レベル3)
自動運転車の進歩によって、運転操作は楽になるだろう。日本でも、2020年を目途に高速道路での自動運転(レベル3)の実用化が進められている。だが、万一事故が発生した場合、その法的責任は誰が取るべきなのだろうか。
コロンビア大学の研究チームは、自動車メーカーとドライバーの両方を規制する共同責任ルール作りのため、ゲーム理論を使った分析ツールを提案した。研究結果は、2020年1月14日「Transportation Research Board(米国交通運輸研究会議)第99回年次総会」で報告された。
自動運転に関する多くの研究が、交通の効率と安全を保証するアルゴリズムに焦点を当てる一方、研究チームは、自動運転車の発展に伴う人々の「モラルハザード(倫理観の欠如)」を指摘している。「ドライバーは自動運転車のことを、人が強引で危なっかしい運転をしていても対応できる知的なエージェントだと感じている」と、Sharon Di助教授は語る。
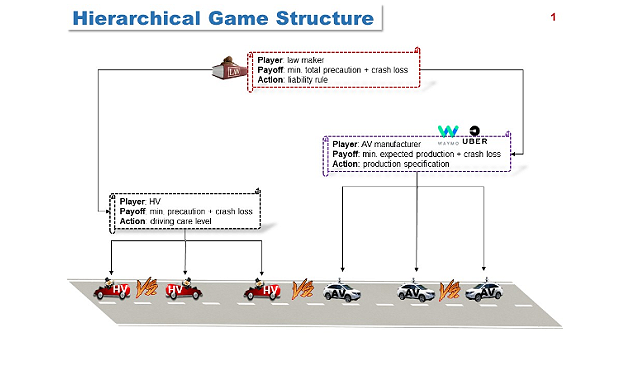
研究チームは、ゲーム理論を使って、立法機関、自動車メーカー、自動運転車そのもの、そして人間のドライバーをプレーヤーとする世界をモデル化し、それぞれに目標を設定した。立法機関の目標は効率と安全性を高め、交通を規制すること。メーカーは利益の重視。自動運転車とドライバーは、公道で互いにやり取りし、最善の運転方法を見つけることとした。
加えて研究チームは、多くの数値例を使ったシミュレーションから、ドライバーのモラルハザード、交通安全におけるメーカーの役割、新しい交通システムへの立法機関の適合性を調査した。そこでは、自動運転車が市場に浸透するにつれ、どのように責任ルールが変わるべきかということも検討している。
「ドライバーは、道路環境がより安全になったと感じると危険な手段を取る傾向があり、モラルハザードが生まれる。先進の輸送技術で社会福祉と交通安全を改善するには、法整備の最適化が重要なことは明白だ」とDi助教授は指摘する。
シミュレーションの結果から、法整備が適切であれば、ドライバーはモラルハザードを防ぎ、メーカーは交通安全と生産コストのトレードオフを図ると分かった。メーカーへの政府の補助金も効果的だ。適切な補助を受けていない、もしくは、自動運転車の技術仕様が規制されていない場合、メーカーは利益を重視し、全体の交通システムに打撃を与える傾向が示された。
自動運転車には、ハードウェアに加えてソフトウェアも関わるため、事故に対する法的責任問題をより複雑にしている。研究チームは、今回の分析ツールが立法機関の助けとなり、自動運転技術を取り巻く問題の軽減につながることを望んでいる。