- 2020-12-22
- 制御・IT系, 技術ニュース, 海外ニュース
- Physics of Fluids, Yang Luo, イカ, ジェット推進, ストラスクライド大学, スラスター推進, 学術, 流体―構造相互作用シミュレーション, 米国物理学協会, 頭足類
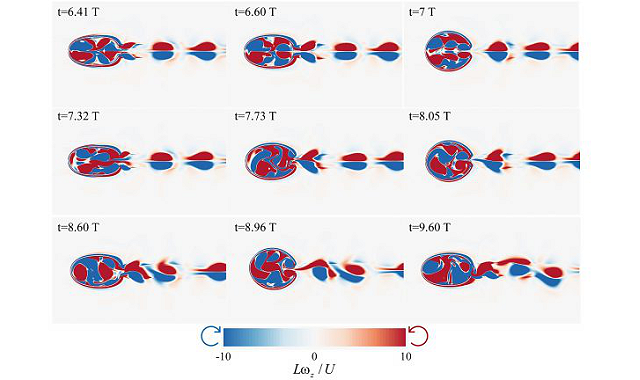
CREDIT: Yang Luo
スコットランド、アメリカ、中国の国際研究チームは、イカなどの頭足類のジェット推進に着想を得た、膨張と収縮を利用する推進システムを提案している。乱流条件下でイカでのジェット推進について理解を深めることは、新しい水中ロボットなどの設計に役立つ可能性がある。
イカなどの頭足類は、外套膜を膨らませて内部空洞の内容積を増し、海水を吸い込む。その後、外套膜を収縮させると内容積が減少して水が噴出し、イカは逆方向に推進する。水生生物の運動システムは、さまざまな水中ロボットや水中の乗り物の開発にヒントを与えているが、頭足類のジェット推進に関する研究はそれほど多くないという。
今回研究チームは、乱流条件下としては初めてイカ様ジェット推進系の数理的研究を行なった。その結果、乱流条件下では、層流条件に比べて、推力生産と効率化が高いことが分かった。研究の詳細は、米国物理学協会が発行する『Physics of Fluids』誌に、2020年11月3日付で公開されている。
研究モデルとして、圧力がかかるチャンバーと水の出入り口となるノズルを備えた柔軟な外套膜を持つ2次元のイカ様スイマーを使用している。外套膜の表面には、イカ筋肉の収縮を模倣した外力がかかる。流体―構造相互作用シミュレーションの結果、乱流を考慮すると、ジェット推進がより効率的になる可能性が示された。乱流で性能が向上するのは、噴出により起こる渦がより強いことと、抗力を伴う外乱が抑制されるためだ。
また、噴出を数回繰り返した後のジェット渦の対称性を破る不安定性のメカニズムが、これまでに報告されている層流条件での対称性を破る不安定性とは異なることも発見した。乱流下では、不規則な内部渦により不安定となり、後流の対称性の破れの原因になっている。
対称性を破る不安定性のメカニズムについての知見は、イカにヒントを得た水中ロボットなどの設計に役立つという。連続的なジェット推進は好ましくない可能性があり、設計の際には、不安定性の影響を軽減するために、ボディの変形をアクティブ制御して内部渦のパターンを変化させるなどの対策が必要となる。
論文の筆頭著者であるストラスクライド大学のYang Luo氏によると、ジェット推進に基づく新しい乗り物がすぐにできるかについては現状では判断が難しい。しかし、瞬間的に逃げることができたり、簡単なメカニズムのため操縦性が高かったりする点では有利であるため、一般的なスラスター推進に併せて必要なときだけジェット推進を利用することが期待できるという。