- 2021-4-20
- 技術ニュース, 機械系, 海外ニュース
- IEEE International Conference on Soft Robotics (RoboSoft) 2021, ソフトロボット, ハードロボット, マサチューセッツ工科大学(MIT), 上腕三頭筋, 上腕二頭筋, 学術
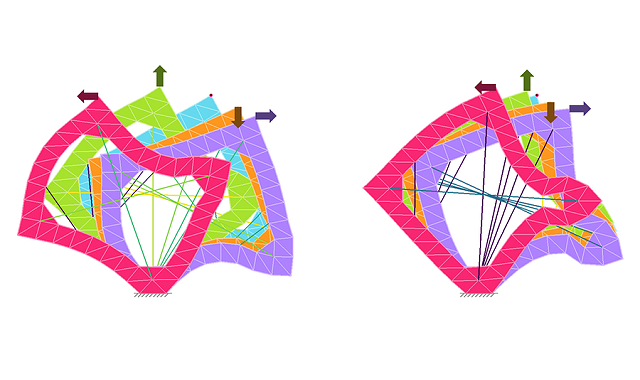
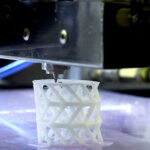
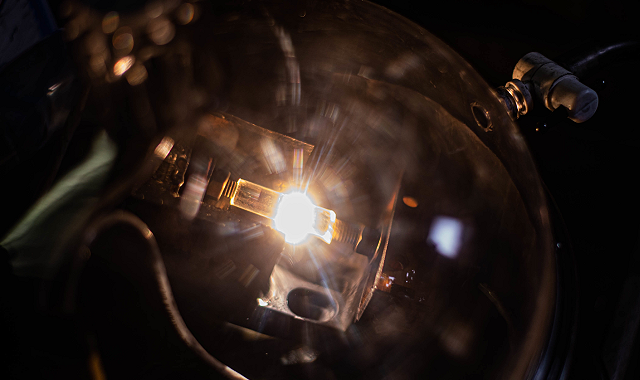
Image: courtesy of the researchers
マサチューセッツ工科大学(MIT)は、2021年3月3日、コンピューター上でシミュレーションを行い、必要に応じて硬化するソフトロボットのコンセプトを開発したと発表した。
従来、ロボットは硬くて金属的な外骨格を使用したものが一般的だった。それに対し、魚やその他の柔らかい生物にインスパイアされたソフトロボットは、環境の変化によりうまく適応し、人間と共に働く際により安全である可能性がある。一般的に、ロボット開発者は、特定のタスクのために外側が硬いロボットとソフトロボットのどちらを設計するかを決める必要があった。今回の研究により、どちらかを捨てるような決定をする必要はなくなるかもしれない。
研究チームは、2017年にアルゴリズムによるソフトロボット制御に関する研究を発表している。ケーブル駆動ソフトロボットの制御にシミュレーションを用い、ロボットが目標とする位置を選択して、その位置に到達するには各ケーブルをどれだけ引っ張る必要があるかをコンピューターで計算した。ケーブルを引っ張るというような動作と同様のことが、私たち人間が何かに手を伸ばすたびに体内では起こっている。私たちの手が目標とする位置は、腕の筋肉の収縮に変換されているのだ。
今回の研究では、先行研究と同様の技術を用いて、ケーブル駆動ソフトロボットが目標とする位置とロボットの剛性を同時に制御する方法を示した。この方法では、複数のケーブルを利用する。一部のケーブルを用いてロボットのボディをねじったり回転させたりすると同時に、他のケーブルを用いて相互に釣り合いを取るようにし、ロボットの剛性を微調整する。
これは、人間の腕からインスピレーションを受けている。人間は上腕二頭筋を収縮させるだけでひじをある程度曲げることができるが、上腕二頭筋と上腕三頭筋を同時に収縮させることで、腕をある位置で硬く固定できる。つまり、ある物の両側を引っ張ることで硬くすることができるのだ。
今回はコンピューター上で、さまざまな形状のロボットの動きと剛性調整をシミュレートした。ロボットが硬化した場合、押されたときにどれだけ位置を変えずに耐えられるかをテストしたところ、ロボットは全ての角度から同じように耐えられるというわけではなかったが、おおむね意図したとおりに剛性を保った。
この制御システムは、ロボットが実行するタスクの範囲を広げ、ロボットと人間が相互に関わる際の安全性を高めることができるようにするかもしれない。また、このアプローチにより、ハードロボットの強度や精度とソフトロボットの流動性や安全性を兼ね備えた新世代のロボットを作ることができるようになる可能性がある。
現在、研究チームは、必要に応じて硬度を変える制御システムを実際に試すためのプロトタイプロボットを開発しているところだ。