- 2022-2-9
- 制御・IT系, 機械系, 研究・技術紹介, 電気・電子系
- A-Traction, ANSUR –Another Surgeon-, da Vinci(ダビンチ), ロボット, 伊藤雅昭, 内視鏡手術支援ロボット, 医工連携, 医療ロボット, 国立がん研究センター東病院大腸外科, 技術認定医制度, 東京大学医用精密工学研究室, 産業ロボット, 腹腔鏡(ふくくうきょう)手術

朝日サージカルロボティクス株式会社 代表取締役社長 安藤岳洋氏
産業界では慢性的な人手不足が世界的な問題となっており、製造工程へのロボット導入による省人化、省力化が進んでいます。近年では人と一緒に作業することを目的とした協働ロボットがサービス業の現場などにも導入されるケースが増えています。この動きは医療分野においても例外ではなく、医師をサポートする医療ロボットに関する研究開発が進んでいます。最近では医療ロボットが登場するテレビドラマもあったりと、医療ロボットの認知度も徐々に高まってきています。
今回の連載では、医療系ベンチャーとして国産の手術支援ロボットの開発、製品化に取り組む朝日サージカルロボティクス株式会社 代表取締役社長の安藤岳洋氏に、医療ロボットについてのお話を伺いました。
第1回目となる本記事では、「臨床の現場で医師をサポートする【医療ロボット】とは」と題し、医療ロボット、特に腹腔鏡手術を支援する医療ロボットの概要、歴史などについて、ご紹介します。(執筆:後藤銀河、写真・画像提供:朝日サージカルロボティクス株式会社)
<プロフィール>
朝日サージカルロボティクス株式会社 代表取締役社長 安藤岳洋氏
2012年 東京大学大学院工学系研究科修了
2012年 同大医用精密工学研究室助教
2015年 株式会社A-Traction創業 代表取締役社長に就任
2021年 朝日インテック株式会社による子会社化が完了、社名を朝日サージカルロボティクス株式会社に変更
ベンチャーとして国産の手術支援ロボット開発を目指す
――よろしくお願いします。では、初めに御社の事業紹介をしていただけますか?
[安藤氏]まず、私たちが2015年に医療系ベンチャーA-Tractionとしてスタートしたのは、当時私が所属していた東京大学医用精密工学研究室に、国立がん研究センター東病院大腸外科の伊藤雅昭医師から、「医療現場のニーズを解決するため、医工連携の基盤を作りたい」というお話があったのがきっかけです。
その後、ベンチャーキャピタルの支援を得るなどしつつ6年をかけて、「ANSUR –Another Surgeon-」というコンセプトのもと、執刀医が通常の手術器具を使いながら、さらに助手2人分の器具を操作できるという、ハイブリッド式手術支援ロボットを開発し、製品化に向けて実証実験を行っています。
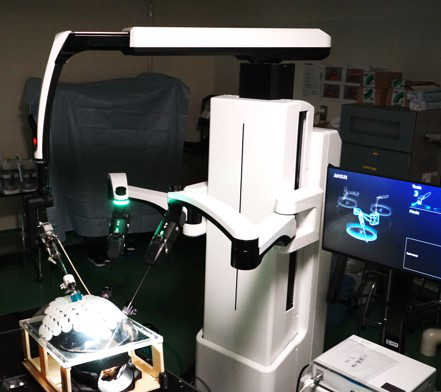
助手2人分の器具を操作できる手術支援ロボット画像提供:朝日サージカルロボティクス
内視鏡手術支援ロボット市場は「ダビンチ」の一強
――手術支援ロボットに注目されたのはなぜなのでしょうか。
[安藤氏]医療分野においては、特に腹部に小さな穴をあけて内視鏡と鉗子を挿入して手術を行う「腹腔鏡(ふくくうきょう)手術」向けに、外科医による施術をサポートする内視鏡手術支援ロボットの導入が進んでいます。
こうした医療ロボットの先駆けは、アメリカのインテュイティブサージカル社が1999年に販売を開始した「da Vinci(ダビンチ)」です。これは同社が30年以上の時間をかけて開発してきたもので、年間500億円規模の研究開発費を投入しており、これまで事実上の1強として市場を占有していました。ダビンチが医療ロボットの先駆者として強力な特許を多く保有していたこともあり、日本は医療ロボットの開発・製品化という点で、これまで大きく後れを取っていました。
こうした状況ではダビンチや競合他社の得意とする領域で真っ向から勝負するべきではないと考え、私たちはベンチャーとしての強みを生かし、「ダビンチとは違う視点からのロボット」というコンセプトで開発を進めることにしました。
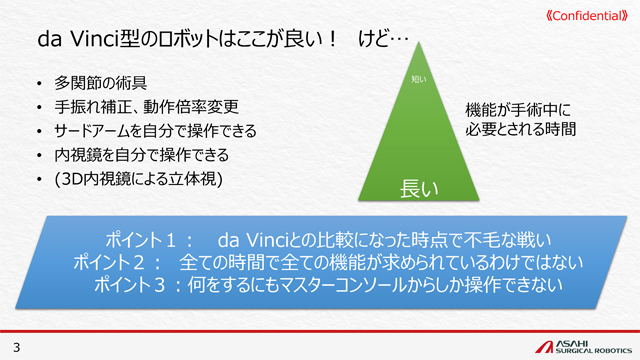
ダビンチとは違う良さをピンポイントで考えるというアプローチ。
資料提供:朝日サージカルロボティクス株式会社
[安藤氏]医療現場では、通常の開腹手術に比べて患者の負担が少ない低侵襲の腹腔鏡手術を広めたいというニーズがあります。通常腹腔鏡手術では棒状の術具を使いますが、ダビンチ型ロボットが優れているのは、多関節の術具を備えていて先端が曲げられるので、特に運針などで使いやすいという点です。他にも手振れ補正ができたり、動作倍率を変更できたり、助手のアームを自分で操作できたり、内視鏡を自分で操作できるという利点もあります。
「良い手術」に立ち返ることで、万能型ではなく、必要な機能に絞り込む
[安藤氏]ただ、これらの機能は手術中にいつも使われているわけではありません。サードアームや内視鏡は手術中に頻繁に操作する一方で、多関節術具は運針のときにはとても便利ですが、それ以外のときには無くても手術は可能です。また、ダビンチ型ロボットの操作は、すべてサージョンコンソールと呼ばれる操作卓から行う必要があり、術者が術具持ったままでは操作できず、都度、術具を置いて、操作する必要があります。そこで私たちは、「良い手術」に必要な機能は何かを改めて見直し、ピンポイントに機能を絞り込むことで、ダビンチとは別の形のロボットができるのではと考えたのです。
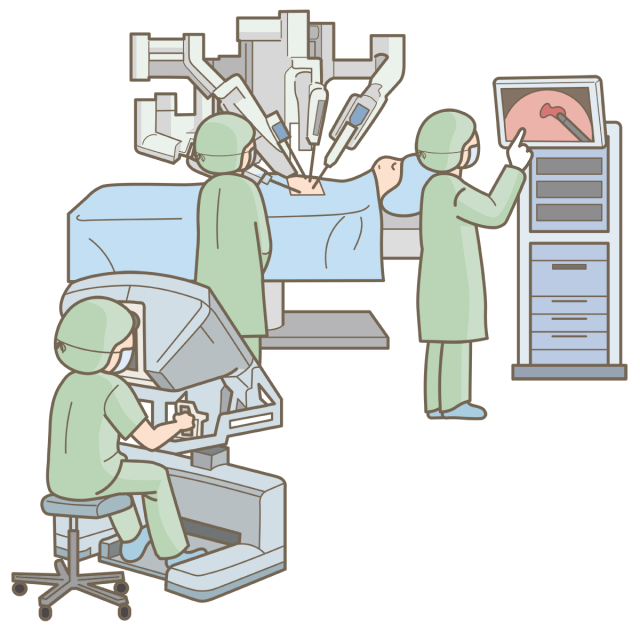
サージョンコンソールのイメージ図。手前のコンソールでロボットの操作を行う。
[安藤氏]日本内視鏡外科学会には技術認定医制度というものがあり、ここに良い手術についてのヒントがありました。ここで使われている採点表を調べると、評価項目の半数近くが視野展開や助手との連携に関することだったのです。この助手との連携がなぜ重要かというと、例えば電気メスで切断しようとした部位を、助手が適切に把持してテンションをかけていないと、電気メスの熱がたまってしまい、うまく切断できないという危険な状況になってしまうためです。また、内視鏡で見たいところを見せてくれるということも重要な点です。
このように、執刀医の立場から見ると、助手との連携が重要なのですが、技量の問題があったり、口頭での指示には限界があったり、また人手不足でそもそも助手が足りないという状況になっているようです。そこで「使いたいときだけ自分の手を拡張できれば、手術の質を向上できるのでは?」と考えました。
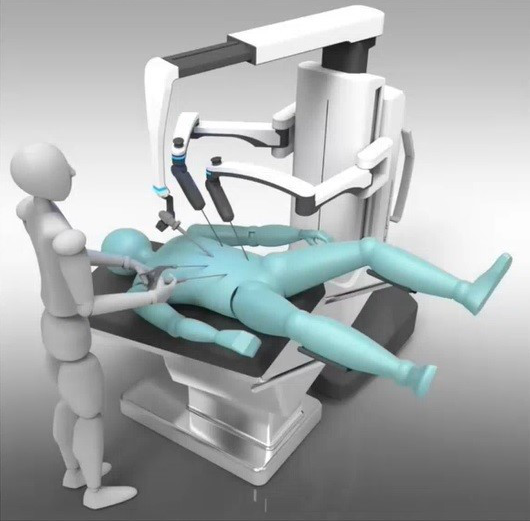
左が執刀医。自分の術具を動かしながら、ロボットのアームもコントロールできる。画像提供:朝日サージカルロボティクス株式会社
[安藤氏]私たちが開発しているのは、執刀医が自分で操作しながら1人で腹腔鏡手術を実施できる医療ロボットです。フットペダルを操作することで、執刀医の手の動きとロボットの手の動きをシンクロさせ、ロボットが持つ鉗子を自由にコントロールできるという特徴があります。
ロボットは患者の傍らに、術者と対面するように置かれ、助手2人分の役割を担います。術者の持つ術具にセンサーを取り付けてあり、フットペダルを操作している間のみ、ロボットの術具は術者の術具に追従するように動きます。つまり、必要なときだけ助手の術具を自分で操作することができます。具体的にはパソコンのマウスを使ったドラッグアンドドロップのようなイメージで、鉗子を開閉して対象を把持し、引っ張ってテンションをかけ、そこに留めておくといった操作が、術者一人で可能になります。
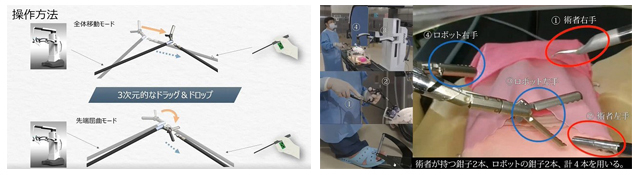
操作法はシンプルで、左のロボットの術具を右の術具でリモコン操作しているイメージだ。画像提供:朝日サージカルロボティクス株式会社
次回は、「産業ロボットと医療ロボット、その違いとは」と題してお話を伺います。
取材協力

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。