- 2022-9-23
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリント, LiDARセンサー, Science Advance, グリップグローブ, シリコーンエラストマー, ストーク(突起物), タコ, バージニア大学, ファンデルワールス力, マイクロコントローラー, 吸盤, 学術, 水素結合
バージニア大学を中心とするアメリカの研究チームは、タコの吸盤に着想を得たグリップグローブを開発した。水中で確実に物をつかむことができ、吸着状態を素早く切り替えることが可能だ。研究成果は『Science Advance』誌に2022年7月13日付で公開されている。
乾燥した環境では、ファンデルワールス力や水素結合などを利用して物体同士をくっつける方法がある。しかし、湿潤環境ではこれらの力は著しく低下するため、水中での効果的かつ可逆的な吸着方法は大きな課題となっている。
タコの吸盤は単に物体を吸着するだけでなく、対象物を検知するさまざまなセンサー機能を有している。例えば、吸盤に存在する受容器は、液体の流れや圧力、対象物質表面の接触を感知する。8本の足には2000個以上の吸盤が存在し、それぞれが独立して制御され、吸着のオンオフが切り替えられている。
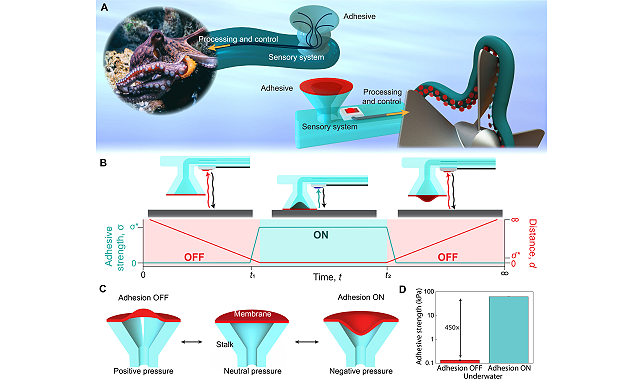
現在利用されている吸着材料を用いた操作システムは、人間が手動で操作するためオンオフに時間がかかるものが多い。そこで研究チームは、タコの吸盤にヒントを得た水中吸着システムを開発した。このシステムは、切り替え可能な吸着部品(吸盤)と、オンオフを自律的にするための感覚システム、処理、制御で構成されている。
吸盤の役割をするのは、空気圧で作動する膜に覆われたシリコーン製ストーク(突起物)だ。ストークは3Dプリントで作った型にシリコーンエラストマーを流し込み、硬化させたものだ。吸盤には対象までの距離を測定するLiDARセンサーと、リアルタイムで吸着を制御するマイクロコントローラーが統合されている。この組み合わせはタコの神経系を模倣したものだ。
開発したグリップグローブは、60kPa以上という強い吸着力を持つことが明らかとなった。また50ミリ秒以内にオン/オフを切り替え、オンになると吸着力が450倍以上に上昇した。
研究チームによると、今回の研究は光センサーに焦点を当てたものだが、将来的には異なるセンシングモダリティを利用することも可能だという。タコは水中での操作中に、視覚、化学的、機械的といった多様な感覚を示すことが知られており、化学センサーやメカニカルセンサーとの相乗効果も期待できる。また、このシステムに触覚フィードバック機能を組み込むことで、吸着がオンになるとユーザーに知らせる通知システムを付加できる可能性もある。
※記事初出時、文中に誤りがあり、「また50ミリ秒以内に450回以上オンオフの切り替えができた。この切り替えの速さは本物のタコよりも優れているという」と記載しておりましたが、正しくは「また50ミリ秒以内にオン/オフを切り替え、オンになると吸着力が450倍以上に上昇した」でした。訂正してお詫びいたします。
関連リンク
Octopus-inspired adhesive skins for intelligent and rapidly switchable underwater adhesion