- 2023-6-16
- 技術ニュース, 機械系, 海外ニュース
- Robotics: Science and Systems, グリッパー, コロンビア大学, サプライチェーン問題, センシング技術, マテリアルハンドリング, ロボットハンド, 光学式触覚ロボットフィンガー, 吸盤, 学術, 機械学習技術, 物流, 視覚, 触覚, 運動学習アルゴリズム

Credit: Columbia University ROAM Lab
高度な触覚と運動学習アルゴリズムを組み合わせ、視覚に依存せず物体を操作できる器用なロボットハンドが開発された。この研究は米コロンビア大学によるもので、2023年7月10〜14日に韓国で開催される国際会議「Robotics: Science and Systems」で詳細が発表される予定だ。
現在、ロボットのグリッパーや吸盤で物体を持ち上げたり置いたりすることはできるが、組み立て、挿入、位置変更、包装など、より繊細な作業は人間の手による操作の領域のままだった。しかし、センシング技術と感知データを処理する機械学習技術の進歩により、ロボット操作の分野は急速に変化している。
研究チームは、先行研究で新しい光学式触覚ロボットフィンガーを開発。これは、複雑な多曲面を完全にカバーしながら、サブミリメートル精度で接触位置を特定できる初めてのロボットフィンガーだった。このロボットフィンガーは作りが小型で配線数が少ないため、ロボットハンドに簡単に組み込めるようになった。
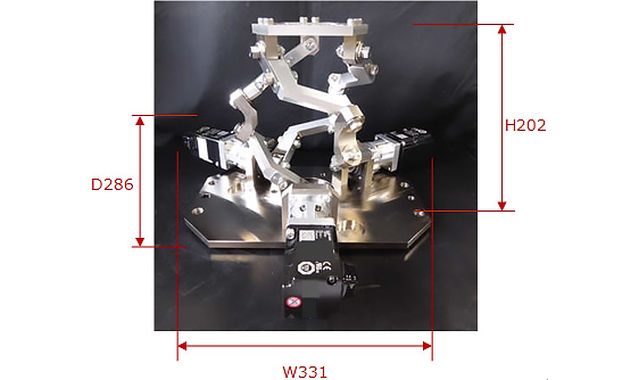
今回の研究では、研究チームのタッチセンシング技術を備えた5本のロボットフィンガーと、15個の独立作動する関節を持つロボットハンドを設計、作製した。この触覚ロボットハンドが複雑な操作タスクを遂行する能力があるかテストするため、練習を通じてロボットが新しい物理的作業を学習する、運動学習の新しい方法を用いた。特に、深層強化学習と呼ばれる手法を使用し、可能性のある運動戦略を効果的に探索するために研究チームが開発した新しいアルゴリズムで補強した。
運動学習アルゴリズムへの入力は、研究チームの触覚および固有感覚データのみで、視覚は一切使用しなかった。ロボットはシミュレーションをトレーニングの場として使い、最新の物理シミュレーターと高並列プロセッサーのおかげで、約1年分の練習を実時間にしてわずか数時間で完了した。
こうしてトレーニングした操作技術を実際のロボットハンドに移植して実施した実証実験では、でこぼこした形状の物体を常に安定した状態で保持したまま、任意に大きく回転させるという難しい操作タスクが選ばれた。このタスクは、ロボットハンドの指の一部分を常に再配置しなければならない一方で、他の指は物体を安定して保持する必要があるため、非常に困難だ。しかし、このロボットハンドは、視覚的なフィードバックが全くない状態で、タッチセンシングのみでこのタスクを遂行できた。
さらに、このロボットハンドは外部カメラを必要としないため、照明やオクルージョン(手前にある物体が奥にある物体を隠している状態)などに影響されない。視覚に依存せずに物体を操作するので、視覚ベースのアルゴリズムを混乱させるような非常に難しい照明条件下でも、暗闇の中でも操作できる。
このロボットハンドの器用さは、全く新しい用途への道を開くと期待されている。より直接的な用途としては、物流やマテリアルハンドリングの分野で、近年、悩みの種となっているサプライチェーン問題の緩和や、工場での高度な製造や組み立てに役立つ可能性が考えられる。
研究チームは、触覚に視覚的なフィードバックを追加すれば、さらに器用な動きを達成できると期待し、いつの日か人間の手の再現に迫ることを目指しているという。
関連情報
Highly Dexterous Robot Hand Can Operate in the Dark — Just Like Us | Columbia Engineering
Sampling Based Exploration for Reinforcement Learning of Dexterous Manipulation