- 2024-7-26
- 技術ニュース, 機械系, 海外ニュース
- Advanced Intelligent Systems, ウェアラブルアシストロボット, ソフトロボット, ノースカロライナ州立大学, ポータブル型エンジン, 人工筋肉, 外部電源, 大型エアーコンプレッサー, 学術, 油圧, 空気圧, 筋肉, 軽量流体エンジン, 高トルクモーター
ノースカロライナ州立大学は2024年7月1日、同大学の研究チームが、筋肉を模倣したウェアラブルアシストロボットを動かすための、軽量流体エンジンを開発したと発表した。外部電源と物理的につなげずに大きな力を発生させることが可能だ。
油圧や空気圧など流体の挙動を利用したエンジンを動力源とするソフトロボットは、硬いロボットにはできない方法で筋肉の挙動を模倣できる。そのため、上肢や下肢を動かす能力を向上させる補助装置として応用できる可能性がある。
しかし、ほとんどの流体エンジンは大型エアーコンプレッサーのような外部電源に物理的に接続されるため、実用性が低いという欠点がある。また、外部電源を必要としないこれまでの流体エンジンは、大きな力を発生できないため、こちらも実用性の面で制限があった。
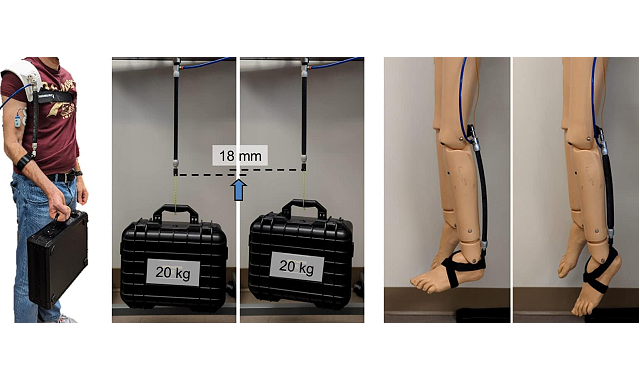
研究チームが開発した新しいエンジンは、ソフトロボット内のチャンバーにオイルを出し入れすることで、ソフトロボットが屈伸する人工筋肉として機能する。人工筋肉が大きな力を発生できるように、流体エンジンのポンプをバッテリー駆動の高トルクモーターで駆動し、大きな圧力を発生させている。
概念実証実験では、発生する力の大きさだけでなく、いかに効率よく電力を流体動力に変換するかについても評価した。その結果、流体エンジンの重量を低く抑えながら、外部電源につなげていないエンジンとしては前例のない大きさの力を発生できることを確認した。最大で580Nの力を発生できる。また、最大効率は従来の外部電源に接続していないポータブル型エンジンよりも大幅に高いことが示された。上腕二頭筋の活動に対する補助効果、足関節の底屈の補助効果などについて実験したところ、5kgの重量を持ち上げる際の上腕二頭筋の活動に対する補助では、アシストロボットを装着していない場合と比べて、筋活動が平均39%減少した。
研究チームは、今回の結果はこれまでの流体エンジンの実用面における課題を解決するものだと述べている。研究成果は、『Advanced Intelligent Systems』誌に2024年6月13日付で公開されている。
関連情報
Portable Engine Can Power Artificial Muscles in Assistive Devices | NC State News