東北大学は2018年6月14日、とがった物体や複雑な形状をした物体、もろい物体など、さまざまな物体をつかめるロボットハンドを開発したと発表した。
これまでも同研究グループは、形や大きさが異なる物をつかめる膜袋型のロボットハンドを開発してきた。ハンドは袋状の柔軟袋とその袋内に粉体が充填された構造をしており、物体をつかんだ後に粉体部を真空にすることでハンドの剛性が高まる。
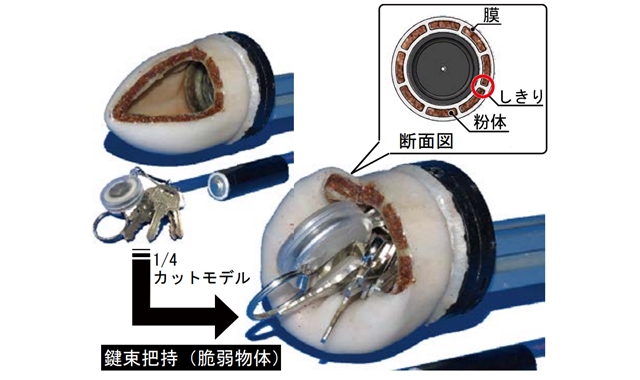
しかし、従来の袋型ハンドはとがった対象物をつかむ際に破れるという問題があり、袋が破れると柔剛の切り替え機能が十分に働かなくなってしまう。そのため、破損バルブの開閉や瓦礫内のガラスの破片、鉄筋の露出したコンクリートなどをつかむ際には、対象物に合わせてハンドを別のものに付け替える必要があった。
今回の研究では、これまでのゴム膜に替えて伸縮性のある防刃生地を使うというアイデアを考案した。防刃生地を先端が半球形状となる袋状にし、その表面に滑り止め用のシリコンゴムを塗布して耐切創性カバーを作成した。これにより、柔軟性を保ちながら優れた耐切創性を持つ袋型ロボットハンドを実現した。
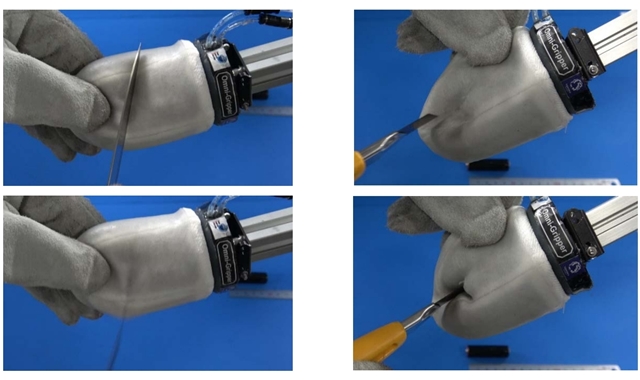
研究グループが、破損したバルブの開閉動作実験を行ったところ、従来ではゴム膜がバルブのとがった部分に接触し破損していたが、今回は破損なく開閉作業ができることを確認した。加えてニッパーを刃先からつかむ実験にも成功。さらに本体が軽量なため、災害対応用ヘビ型ロボットに搭載し、高い剛性が求められるボタン押し、低押付力が必要となるハンドル把持、配電盤開けにも成功した。
今回の成果により、つかめる対象物の範囲が飛躍的に拡大されるため、災害復旧や工場での作業の効率化/迅速化への大きな寄与が期待できるという。今後は、耐久性のさらなる向上など、実用化を目指した研究を進め、3年以内に実際の瓦礫に近い環境下で実用性の確認を行う予定だ。さらに、廃品回収用の産業ロボットメーカーなどと協力して、事業化を進めるとしている。