- 2018-7-7
- 技術ニュース, 海外ニュース, 電気・電子系
- CMOSデバイス, FPGA, Vivienne Sze, VLSI Technology and Circuits, マサチューセッツ工科大学, 学術, 超小型省電力チップ
アメリカのマサチューセッツ工科大学のVivienne Sze准教授らは2018年6月20日、ミツバチのような小型のデバイスの位置制御に利用できる超小型省電力チップ「Navion」を開発した。研究成果は国際シンポジウムVLSI Technology and Circuitsにおいてプロシーディングス「Navion: A Fully Integrated Energy-Efficient Visual-Inertial Odometry Accelerator for Autonomous Navigation of Nano Drones」として発表されている。
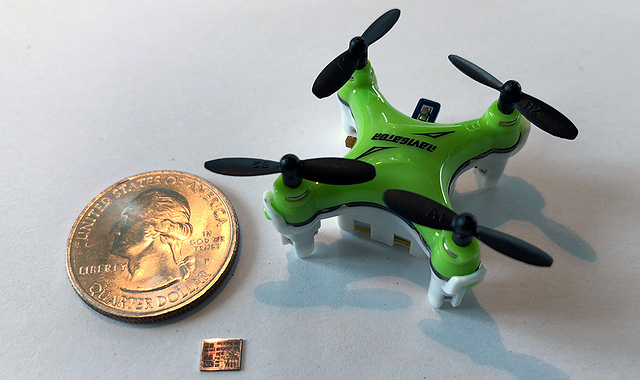
Navionは、65nmプロセスによる CMOSデバイスで、サイズは約20平方mm、消費電力は24mW、毎秒最大171フレームのカメラ画像をリアルタイム処理し、慣性測定もできる。この画像処理と慣性測定データからチップの位置を特定することで、GPSデータが利用できない地域でのナビゲーションに利用できる。また、限られた電源で長時間にわたって制御が必要な小型ロボットへの応用にも期待される。「ミツバチのような超小型デバイスや気象観測バルーンへの応用、さらには発熱量も小さく体内に取り込める医療機器にも搭載できるだろう。」と、共同研究者のKaraman博士は語る。
手のひらに収まるような小型ドローンの設計では、電力の大半は飛行用モーターに消費され、ナビゲーションや空間位置把握といった機能への電力はほんの少しの容量しか確保できない。研究チームが実施した先行研究では、アルゴリズムとハードウェアを1つのチップで組み合わせるFPGAを採用することで、通常は10~30Wの電力を必要とする標準的な小型ドローンと同レベルの状態推定機能を2Wで実現した。しかし、この電力は小型ドローンが状態推定機能のために保持できる約100mWよりも大きく、さらなる改良が必要とされていた。
研究チームは、チップの消費電力をさらに低減するため、データ量を最小限に抑える設計を検討した。その結果、一時的に保存する画像データを圧縮したり、データ内のゼロを含む計算ステップをスキップする方法を考案したことで、チップのメモリを前の2MBから0.8MBへと減らすことができ、消費電力は2Wから24mWにまで減らすことができた。
研究チームは、今後ミニチュアレースカーにチップを実装し、実証テストを行う予定だ。搭載したライブカメラの表示から、チップの空間位置情報をリアルタイムで判定し、必要な電力量を測定する。そして最終的には、超小型ドローンへの搭載に向けた実験へと進めるとしている。
関連リンク
Chip upgrade helps miniature drones navigate
Navion: A Fully Integrated Energy-Efficient Visual-Inertial Odometry Accelerator
for Autonomous Navigation of Nano Drones