- 2018-9-15
- 技術ニュース, 機械系, 海外ニュース
- Advanced Materials, Donald Ingber, Robert Wood, ハーバード大学, ボストン大学, 学術, 油空圧利用マイクロ流体折り紙技術(MORPH), 超小型ソフトロボット
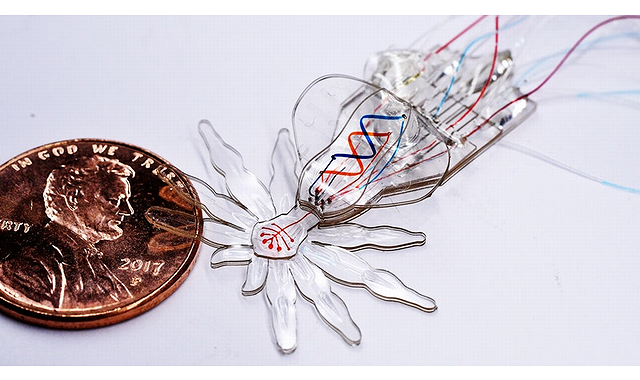
新しい製作プロセスにより作り出した数ミリの小型孔雀クモ型ロボット。カラフルな目や腹部を有し、体の各部は液体回路で駆動する。
ハーバード大学とボストン大学の共同研究チームが、ミクロン単位の微細構造を持ち、サイズが数ミリ程度の超小型ソフトロボットを製作する技術を開発した。この技術の可能性を実証するため、オーストラリアに生息する孔雀クモをモデルに、シリコーンゴム製のカラフルなクモ型超小型ソフトロボットの試作に成功した。研究成果は、2018年8月6日にAdvanced Materials誌にオンライン公開されている。
柔軟性のない剛性ロボットでは到達できない人間の体内環境などで使用する医療用途、あるいはウェアラブル機器等の用途に対して、動物にヒントを得た小さなソフトロボットの活用が注目されている。しかし、これまでに数センチ程度のソフトロボットは作製されてきたが、さらに小型かつ多機能なソフトロボットはまだ実現されていないという。
今回研究チームは、従来の小型ソフトロボットは1自由度の動きに単純化されているとし、3種類のプロセスを統合した新ハイブリッド技術により、18の自由度で構造変化や運動が可能な、数ミリのシリコーンゴム製クモ型ロボットを作製した。
開発された再構成可能な油空圧利用マイクロ流体折り紙技術(MORPH)では、最初にソフトリソグラフィー技術を用いて、12個の弾性シリコーン層を作製し、それらを一体化してロボットの構造基盤とする。各層はレーザーのマイクロマシニング技術によって正確に切り出され、各々接合されて3D形状を造り出すとともに、中空のマイクロ流体チャンネルのネットワークを構成する。そして、注入による折りたたみ技術と呼ぶ3番目の技術により、マイクロ流体チャンネルに熱硬化性樹脂を注入して圧力をかける。
これにより各層に局部的な曲げを誘起し、外部からUVを照射して樹脂を硬化させることで最終形状が固定される。このようにして、例えば、柔軟なクモの膨らんだ腹部や、下向きに湾曲した足部が、永久的な構造になる。
マイクロ流体チャンネルはまた、ロボットの歩行等、様々な機能を実現するアクチュエーターとして使われる。試作されたクモ型ロボットでは流体回路に染色液を流すことにより、目や腹部に孔雀クモのような色彩を付与している。
研究チームを指導するRobert Wood教授は、「開発した技術は、剛性ロボットと変わらない複合的で多機能な能力を、ミリサイズで達成できる。将来的には、小さな動物の構造と機能との関係性を積極的に取り入れて進化させたい」と語る。また、医学部のDonald Ingber教授は、「この技術は、医学用途で用いるソフトロボットの分野を切り開く可能性がある。柔軟な超小型ロボットによる内視鏡検査や顕微鏡手術が実現できる」と、その将来性に期待を表している。