- 2019-5-24
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリンター, Eric Diller, Tianqi Xu, トロント大学工学部, 医療用マイクロロボット, 学術
Photo credit: Liz Do
トロント大学工学部の研究者たちが、医療用マイクロロボットを3Dプリンターで造形する手法を開発した。これまで極細のニードルピンセットと顕微鏡を用いて最低でも8時間かかっていた精密作業が、新手法によってわずか20分に短縮されたという。
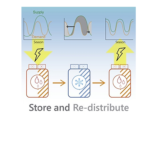
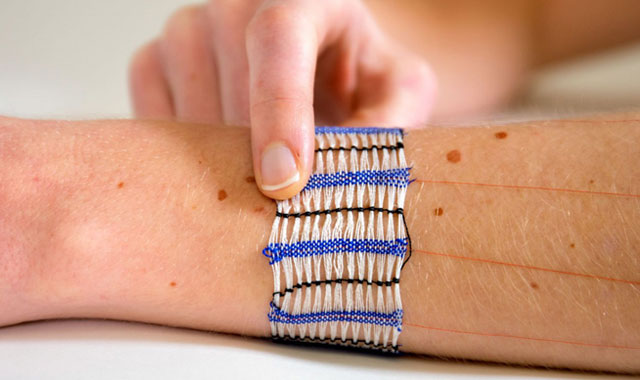
この手法を開発したのは、Eric Diller教授を中心とする研究チーム。開発されたマイクロロボットは、平らで柔軟な物質の上に微細な磁針が多数取り付けられており、磁場を使ったワイヤレス制御が可能で、血管や臓器を通過させたり、顎を閉じることで組織サンプルを採取できる。
研究者たちは新手法の効用を実証するため、20種類以上の異なるロボットのデザインを考案し、3Dプリンターを使って造形した。「以前は、ロボットの作製までの間に何週間も費やしていた。それで完成するデザインはたったひとつだ」とDiller教授はいう。
「今では設計プログラムを作って、ボタンをクリックするだけだ」とXu氏。「簡単に設計し、改良できる。私たちは今、新しいデザインを探求する力を手中に収めている」と述べる。Diller教授らは、より複雑な形状のマイクロロボットの探索を計画している。
開発技術はマイクロロボットのさらなる小型化にもつながる。研究チームのTianqi Xu氏は、「マイクロロボットは手作業で組み立てる必要があったため、より一層小さくするのは困難だった。私たちの研究の主たる目的は、これを達成することだ」と話す。
ドラッグデリバリー、受精補助、生検などの将来の医療用途には、今以上に小さなマイクロロボットが必要とされる。3Dプリンターでの造形が可能になったことで、現在のmmサイズよりも小さく複雑なマイクロロボットを開発する道を開いた。Diller教授は「現在の10分の1以下への小型化が期待できる」としている。
関連リンク
No assembly required: U of T Engineering researchers automate microrobotic designs