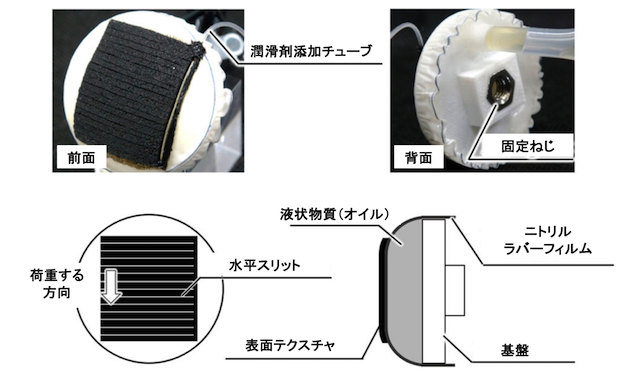
表面テクスチャをはったロボット指先
金沢大学は2019年7月16日、物体をつかんだ工業用ロボットの指先を動かさずに物体を放す制御方法を、同大学理工研究域フロンティア工学系の渡辺哲陽教授らの研究グループが開発したと発表した。この手法により、高い摩擦を持つロボットハンドでも物体を放せるようになるという。
物体をつかむことと放すことは、工業用ロボットの動作としてはいずれも重要だが、これらを両立させるのはこれまで難しかった。ロボットハンドの表面に摩擦の大きな物質を用いれば、物体をつかむことは容易になるが、その一方で物体を放すことは困難になる。
そこで研究グループは、様々な予備実験により、無水エタノールを潤滑剤として摩擦力を制御することで、ロボットハンドの指先を動かさずに物体を放せることを解明した。
そして実験により、ロボットハンドでつかんだ物体が乾いていても濡れていても、無水エタノールを使えば容易に放せることを立証した。等価最大静止まさつ係数の計測により潤滑剤の影響を調べたところ、物体がいずれの状態でも効果が見られたという。
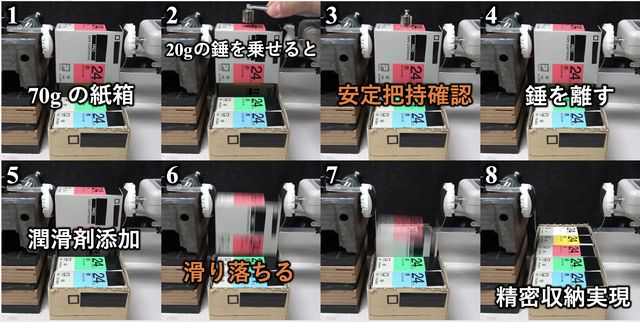
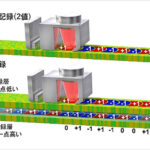
研究グループは、開発技術を応用したロボットハンドを作製。左右のロボットの指先で70gの箱をつかんだ後、潤滑剤を添加すると、つかんだ箱は滑り落ちて下の大きな箱に入り、精密パッキングに成功した。
今回の研究成果は、とりわけ狭い空間でのロボットハンドによる作業の可能性を広げるものだ。今後は、さらに多用な実験条件下で潤滑剤の効果を検証することで、その可能性を高めていくことが期待されるという