- 2019-10-18
- 制御・IT系, 技術ニュース, 海外ニュース
- Aude Billard, Learning Algorithms and Systems Laboratory, Nature Machine Intelligence, スイス連邦工科大学ローザンヌ校, バイオニック義手, ブレイン・マシン・インタフェース, ロボットハンド, 学術, 神経制御義肢技術
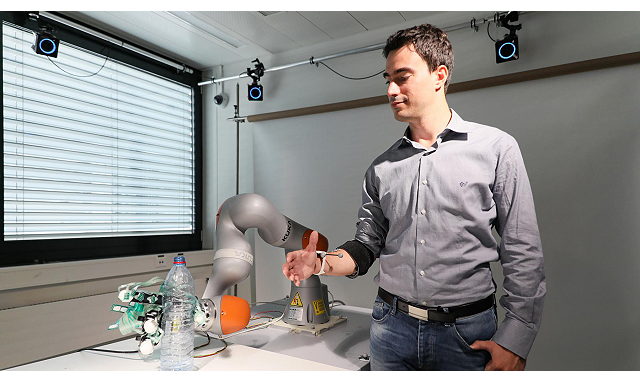
© 2019 EPFL / Alain Herzog. Artoni Fiorenzo tries out shared control with the robotic arm.
ユーザーの自発的制御とロボット制御を組み合わせた新しい神経制御義肢技術のテストが行われ、成功した。この研究は、スイス連邦工科大学ローザンヌ校のLearning Algorithms and Systems LaboratoryのAude Billard教授らによるもので、2019年9月11日付の『Nature Machine Intelligence』に掲載された。
この技術は、2つの異なる分野からのコンセプトを融合したものだ。1つは神経工学からで、切断手術を受けた人の残った腕部分の筋活動から、切除されている指を動かそうとする筋肉の動きを読み取って、義手の指を意図通りに制御するという革新的な試みだ。もう1つはロボット工学からの自動制御で、ロボットハンドがオブジェクトを掴んで適切に保持するための制御だ。
ロボットハンドの制御を改善するため、神経による制御と自動制御を組み合わせる初の試みであり、神経制御義肢における共有制御に貢献するものだ。
筋電位には多くのノイズが含まれることから、有意味な活動を抽出し、動きに変換する機械学習アルゴリズムが必要となる。アルゴリズムにユーザーの意図を解読させるため、切断手術を受けた人の残った腕部分に設置されたセンサーが筋活動を検出し、どの動きが筋活動のどのパターンに対応するかを学習する。ユーザーの意図した指の動きが理解されることで、義手の個々の指を制御できるようになる。
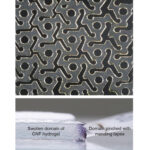
次に、ユーザーがオブジェクトを掴もうとするときにロボット自動制御が作動するよう、アルゴリズムを設計した。アルゴリズムは、義手の表面にあるセンサーが対象に接触したとき、義手に指を閉じるよう伝える。この自動把持は、ロボットアームのための研究を改造したものだが、視覚情報を必要とせずに物体の形状を推定し、触覚情報のみで掴めるように設計されている。
今後、上肢切断者用の義手に実装するためには、アルゴリズム設計にまだ多くの課題が残っているという。だが、今回のアプローチは、バイオニック義手やブレイン・マシン・インタフェースといった神経制御義肢技術に応用できることが期待されている。
関連リンク
A smart artificial hand for amputees merges user and robotic control