- 2019-10-9
- ニュース, 技術ニュース, 機械系
- NEDO, アクチュエータ, バイラテラル・ドライブ・ギヤ, ロボット, 新エネルギー・産業技術総合開発機構, 横浜国立大学, 研究
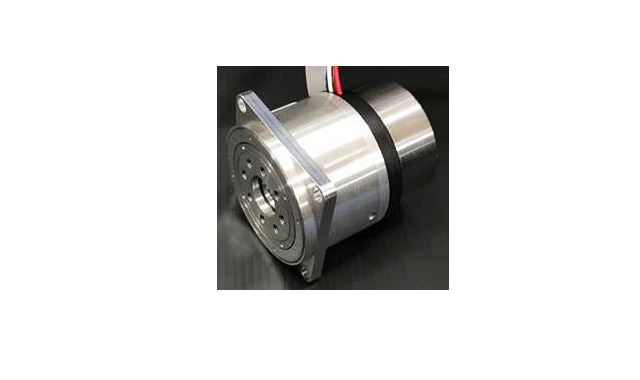
開発したロボット用アクチュエータ
新エネルギー・産業技術総合開発機構(NEDO)と横浜国立大学は2019年10月8日、小型・高効率・高出力なロボット用アクチュエータの開発に成功したと発表した。これを組み込んだロボットアームは関節が柔軟に動作し、繰り返し動作時の消費電力を約5分の1に抑えられる。
高齢化社会では、ロボットが産業界だけでなく社会全体で人の役割の一部を担うことが期待されている。ロボットと人との共存社会では、人とロボットが意図せず接触した際に、その衝撃を吸収して人の安全を確保するため、ロボットの関節が外力に対して柔軟に動くことが求められる。しかし現在、ロボットの関節に使用されている減速機は逆駆動性が低く、安全性が不十分だ。
そこでNEDOと横浜国立大学は、超高減速比でも逆駆動が可能な「バイラテラル・ドライブ・ギヤ」(2号機)を開発した。2号機では、歯車をかみ合わせたときの歯面間に遊びがなく、精密位置制御できるノンバックラッシ化に成功した。
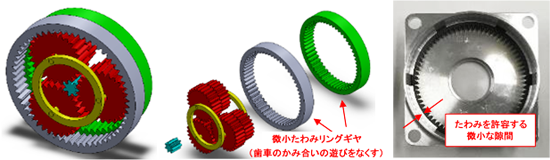
バイラテラル・ドライブ・ギヤ(2号機)の基本構造
このバイラテラル・ドライブ・ギヤに、モーターやモータードライバーを組み込んでモジュール化したのが、今回開発されたアクチュエータだ。このアクチュエータは、自由に複数連結してロボットアームを構築できるので、柔軟なシステムを構築可能。ロボットアームに組み込めば、外力に対して関節が柔軟に動かせるようになる。
また、逆駆動による制動時の熱を電気エネルギーとして効率的に回収することで、繰り返し動作時の消費電力を約5分の1に削減。モーターのセンサー情報から負荷トルクの推定も可能だ。
開発されたアクチュエータは、ロボットの関節部材のほか、電気自動車(EV)や電気自転車など、幅広い分野に展開できると見込まれている。