- 2019-10-26
- 制御・IT系, 技術ニュース, 海外ニュース
- SEA研究所, Stephan Chabardes, The Lancet Neurology, グルノーブル大学, ブレイン・マシン・インターフェース(BMI), 硬膜外皮質脳波(ECoG)シグナル, 適応型解読アルゴリズム

フランスのSEA研究所とグルノーブル大学の研究チームは、四肢麻痺患者がブレイン・マシン・インターフェース(BMI)を通して脳から信号を送り、四肢ロボットシステムを操作して歩かせることに成功したことを明らかにした。2年に及ぶ治験の結果は、医学ジャーナル『The Lancet Neurology』に掲載されている。
外傷性頸髄損傷のおよそ20%が、四肢麻痺に至るといわれている。発表された論文によれば、被験者は脊椎損傷によって四肢麻痺となった28歳の男性で、首から下が麻痺しており、上腕二頭筋と左手首が少し動くだけで、普段は左腕でジョイスティックを使って車いすを操作していた。
四肢麻痺患者の生活の質を向上させる手段として、神経機能を代替する研究開発が行われているが、その代表的なものが、脳と機械を直接つないで操作するBMI技術だ。被験者の頭部には、64の電極を持つ2つのワイヤレスの硬膜外記録装置が上肢感覚運動野上に移植され、硬膜外皮質脳波(ECoG)シグナルを適応型解読アルゴリズムによってオンラインで処理する。硬膜外ECoGは半侵襲的でありながら、効率はマイクロ電極と同程度だという。
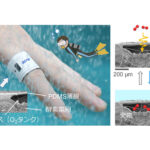
24カ月の研究を通じ、被験者は、研究室では四肢ロボットを、家ではビデオゲーム上のアバターを使って、種々の課題をこなしながら次第に運動の自由度を増やし、遂には歩けるようになった。被験者が身に着けたパワードスーツのような外観の外骨格ロボットは、脳からのシグナルを記録・解読して腕を動かし、バランスをとるために天井から吊されたハーネスを付けて歩いている。研究者達の次の目標は、ハーネスを使わずに、自律的にバランスをとって歩行することだという。
グルノーブル大学病院の脳神経外科医Stephan Chabardes教授は、「この知見は、四肢麻痺患者が脳のシグナルだけでコンピューターを動かすことに、一歩近づくものだ。ジョイスティックの代わりに脳の活動で車いすを動かすところから、さらに移動性を高めた外骨格ロボットの開発へと進むことになる」と、今後の展開についてコメントしている。