- 2019-11-14
- 制御・IT系, 技術ニュース, 海外ニュース
- The International Journal of Robotics Research, アルゴリズム, マサチューセッツ工科大学(MIT), モーションコーン, ロボット, ロボットグリッパー, 学術
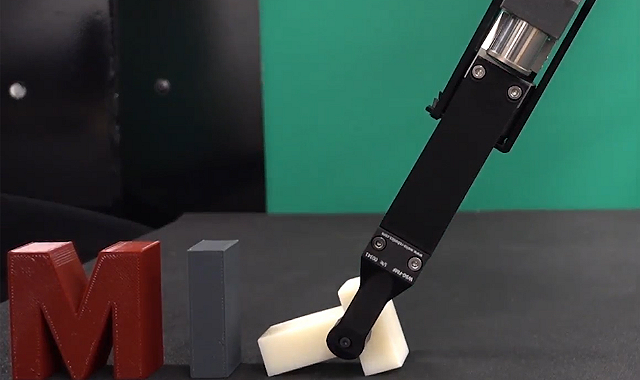
Image courtesy of the researchers
米マサチューセッツ工科大学(MIT)の研究チームは、ロボットが物をつかむまでのシーケンスを高速化できるアルゴリズムを開発した。従来500秒以上かかる計算をわずか1秒以内で完了することが可能で、ピッキングやソート、複雑なツールの使用においても役立つと考えられる。研究結果は、2019年10月17日付けの『The International Journal of Robotics Research』に掲載された。
例えば、「鉛筆を指でつまんで机に立て、そのまま指を滑らせて持ち直す」――これだけの動きでさえも、ロボットにとっては膨大な計算が必要だ。机、鉛筆、グリッパーの形状や摩擦、それらがニュートンの運動法則やクーロンの摩擦法則を満たしつつ、機械的にどのように相互作用するかなど、既存のアルゴリズムは動作に移る前にシミュレーションやプランニングに長々と時間を費やす。
研究チームは、ロボットが動かない面に物体を押し付けながらうまく掴む場合に、必要なプロセスのプランニングの時間を劇的に短縮する方法を考えた。具体的には「モーションコーン」と呼ばれる円錐状の摩擦マップを利用して、ロボット、物体、環境(摩擦など)の3者の相互作用のメカニズムを表現し、動作を決定できるアルゴリズムを開発した。
コーンの内側は物理の基本法則を満足し、ロボットが物体を制御できる領域であり、コーンの外側はロボットが物体を落とす可能性がある領域を示している。「複雑なプロセスだが、従来の方法よりはずっと速い」と研究チームは語る。
実験として、新しいアルゴリズムをシンプルな2指タイプのロボットグリッパーに適用し、T型のブロックを垂直の面に押し付けながらブロックの持つ位置を変える動作を検証した。
ロボットがブロックを持つ場所、押す角度を様々に変えたところ、どの状態に対しても新しいアルゴリズムは結果を返すことができた。新しいアルゴリズムは、ロボットが与えうる可能性のある力のマップと、結果として起こり得るブロックの位置を即座に算出できることを確認した。
アルゴリズムからの予測は、実験室の物理的結果によく一致していた。ブロックの面を向けなおすといった一連の動作の場合、従来のアルゴリズムでは500秒以上かかるのに対して、新しいアルゴリズムではわずか1秒以内で計算できた。
産業用ロボットの多くは、例えばねじを回す工程の場合、アームの先端自体がドライバーのような形状をしているように、用途に特化した形状をしている。そうしたロボットでは細かな動作を設定する必要はないが、その動きは非常に限定されたものとなる。研究チームは、汎用的なロボットがいろいろなものを掴んだり利用したりできるようにしたいと考えている。