タグ:The International Journal of Robotics Research
-

両手と両足で4本のロボットアームを操作して腹腔鏡手術をするシステム――医師の動きを予測して器具の位置調節も
外科医が通常、自らの両腕で操作するロボットアーム2本に加え、両足でもロボットアーム2本を制御することで、アーム4本による腹腔鏡下手術を可能にするシステムが開発された。この研究はスイス連邦工科大学ローザンヌ校(EPFL)に…詳細を見る-
-

-
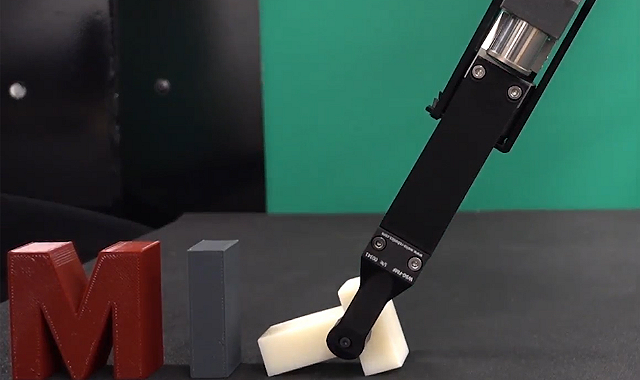
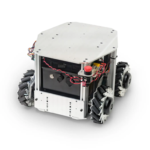
MIT、ロボットが物体を素早くつかんで動かせるアルゴリズムを開発
米マサチューセッツ工科大学(MIT)の研究チームは、ロボットが物をつかむまでのシーケンスを高速化できるアルゴリズムを開発した。従来500秒以上かかる計算をわずか1秒以内で完了することが可能で、ピッキングやソート、複雑なツ…詳細を見る-
-