- 2019-12-9
- 制御・IT系, 技術ニュース, 海外ニュース
- Learning-In-The-LoopOptimization: End-To-End Control And Co-Design of Soft Robots Through Learned Deep Latent Representations, MPM(Material Point Method), Neural Information Processing Systems(NeurIPS 2019), ソフトロボット, マサチューセッツ工科大学(MIT)コンピューター科学・人口知能研究所(CSAIL), 学術
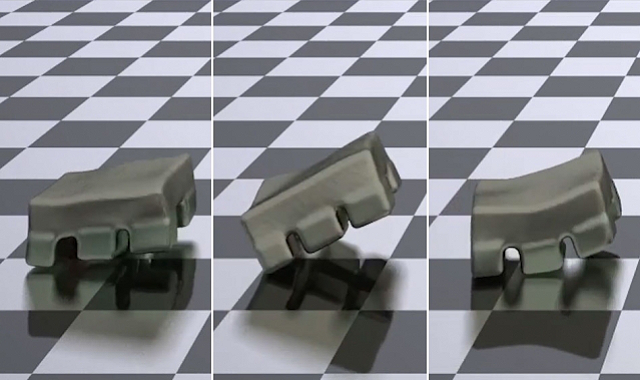
Image courtesy of the researchers
米マサチューセッツ工科大学(MIT)コンピューター科学・人口知能研究所(CSAIL)の研究チームは、2019年11月22日、低次元で簡潔な手法で詳細な状態表現を学習するモデルを開発したと発表した。このモデルは、特定のタスクに対応した移動制御と材料設計パラメーター両方の最適化に役立つという。研究成果は2019年12月11日にカナダのバンクーバーで開催される第33回「Neural Information Processing Systems(NeurIPS 2019)」で発表され、「Learning-In-The-LoopOptimization: End-To-End Control And Co-Design of Soft Robots Through Learned Deep Latent Representations」としてプロシーディングに収録される。
ソフトロボットは、弾力性と伸縮性のある柔軟なボディを持ち、基本的にあらゆる方法に動くことができるロボットだ。その曲がり方には数十億ものパターンがある。
コンピューター計算上、これは非常に複雑な「状態表現」を表す。状態表現とはロボットの各部分がどのように動いているかを描写することだが、ソフトロボットの状態表現には数百万もの次元が含まれることもあり、そのため、ソフトロボットが複雑なタスクを完了するための最適な方法を計算することが難しくなるという。
しかし、研究を進めると、実際には柔らかい物体が曲がる可能性が高い方向、つまり、曲がり方における自然な状態があることが分かったという。ソフトロボットの自然な状態は低次元で簡潔に表現できることを発見し、可能性のある状態を把握することで、ソフトロボットの制御と設計を最適化しているのだという。
モデルは学習ループ最適化の手法を取り込んだもので、何回ものシミュレーションの間中、単一のフィードバックループから最適なパラメーターを学習する。また、粒子法の一種であるMPM(Material Point Method)も採用しており、背面グリッドで囲まれた液体や泡のような連続体物質の粒子の性質をシミュレーションする。こうすることで、コンピューターでの追加計算をしなくても、ロボットの粒子成分やその観察可能な環境をピクセルあるいはボクセルとして扱えるという。
機械学習段階では、元の粒子グリッド情報はエンコーダにより低次元の状態表現へ圧縮され、最適化段階でロボットの制御系にフィードバックされる。圧縮された低次元の状態表現から、ロボットの各粒子が次のMPMシミュレーションでどのように動くべきか制御する。
さらに、制御系は動きのコントロールと同時に、フィードバック情報を基に各粒子が目的の動きを達成するよう最適な剛性を調整する。ソフトロボットの動きと剛性のパラメーターを同時に学習させることで、すべてをできるだけ同期させるので、その結果、設計プロセスが容易になるという。
低次元で状態表現を扱えるようにしたことで、最適化にかかる時間の短縮にもつながった。従来は数分必要であったところが約10秒にまで短縮されたと報告している。実際に、シミュレーションでモデルを応用したソフトロボットの動きを検証したところ、従来であれば、パラメーターの最適化に最大で3万回の計算が必要であったところ、400回程度の計算で済んだという。
モデルを実際のソフトロボットに応用するには、モデルの効率性や正確性を低下させる可能性がある現実世界のノイズや不確定性が課題だという。研究者たちは、実際のソフトロボットにモデルを組み込むことを次の目標としているようだ。
関連リンク
How to design and control robots with stretchy, flexible bodies
Learning-In-The-Loop Optimization: End-To-End Control And Co-Design of Soft Robots Through Learned Deep Latent Representations