新エネルギー・産業技術総合開発機構(NEDO)は2020年1月9日、中央大学と共同で、人間のやわらかな動きを再現できる関節モジュールを開発したと発表した。人との自然な接触や安全な協働作業などができる。
これまでのモーターと減速機によるロボット駆動は、大きな力で正確な動作ができる反面、物体に衝突しても停止できず、人間の近くでの動作に危険を伴った。
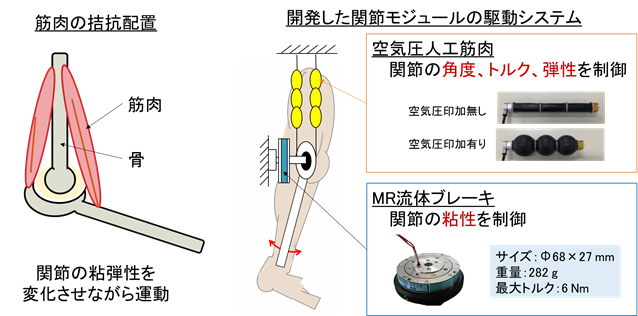
しかし、人間の関節は、構造的に柔軟で軽量な筋肉の拮抗配置により駆動されているため、体が物体に当たった際に関節が倣うように動き、衝撃を和らげる。そこでNEDOらは、人間のやわらかな動きを再現できる関節モジュールを開発した。

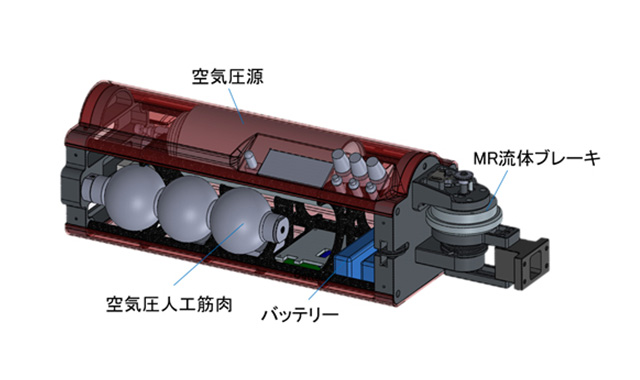
開発した関節モジュールは、空気圧人工筋肉と磁気粘性流体ブレーキ(MR流体ブレーキ)で駆動する。これらにより、人間の関節のように、関節を曲げる力や角度だけでなく、粘弾性を変化させられる。
関節の弾性(やわらかさ)は空気圧人工筋肉で、粘性(速度に対する反力、ダンパ要素)はMR流体ブレーキで変化させる。モーター駆動の装置の場合は制御によって弾性や粘性を変化させるが、今回開発したシステムはハードウェアそのものの特性を直接変化させるため、安全性や応答性に優れているという。
また、関節モジュール内に、空気圧人工筋肉やMR流体ブレーキを駆動するために必要な空気圧源と電源も配置しており、オフラインで駆動できる。さらに、空気圧人工筋肉が軽量で、空気圧源に従来のコンプレッサーではなく液化ガスを用いたことにより、4kgと軽量になっている。
NEDOと中央大学は今後、現在開発中の可変粘弾性下肢アシスト装具Airsistシリーズに、関節モジュールを適用する。また、中央大学発のベンチャー企業であるソラリスを通じた事業化を目指す。