- 2020-5-28
- 技術ニュース, 海外ニュース, 電気・電子系
- ACS Energy Letters, James Pikul, Y-Prize賞, サンドイッチ型電池, ハイドロゲル, ペンシルベニア大学, ロボット, 学術
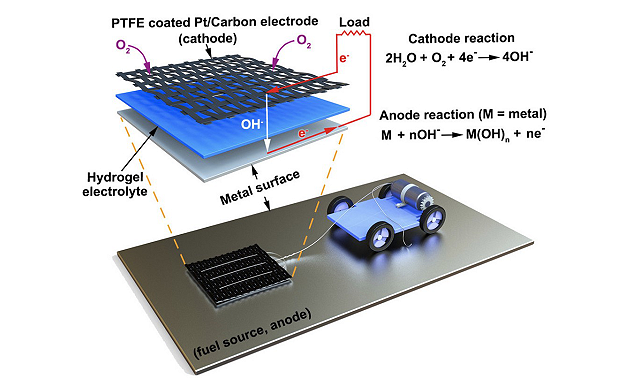
金属表面負極と空気側正極の間に、ハイドロゲル電解質を挟み、接続された電動車両に電力供給する。実証実験として、アルミ表面上を自律永続的に走行させることに成功した。
ペンシルベニア大学の研究チームが、日常環境に存在する金属表面を探して、空気との間で金属空気電池を形成することにより、小型ロボットやデバイスに電力供給する仕組みを考案した。金属空気電池の金属負極を自ら持たず、周囲にある金属を利用することで、電池構造を著しく小さくできるので、最も優れた環境発電より電力密度が10倍高く、リチウムイオン電池よりエネルギー密度が13倍高い電池を構成することができる。環境発電のように周囲環境からエネルギーを収集し、通常の電池のように急速に電力供給でき、人間が食料を食べてエネルギーを得るように、まるでロボットが“周囲の金属を食べて”電力を得るのである。研究成果が、『ACS Energy Letters』誌の2020年3月号に公開されている。
ロボットなどの自己電源として、電池と環境発電という2つの選択肢がある。電池は内部にエネルギーを貯蔵するが、そのため重くなり供給に限界を生じる。一方で太陽光発電のような環境発電は、特定条件下でしか作動せず、エネルギーを電力に急速変換できないという欠点がある。演算能力を増大する半導体チップの小型化とは異なり、電池の小型化は高性能化とはならない。材料中の化学結合密度は不変なので、電池を小さくすると電気化学反応に寄与する化学結合が少なくなるからだ。「このため、小型ロボットやデバイスを長期間、自律的に作動させることは非常に困難だ。昆虫サイズのロボットだと、1分程度しか動作できない」と、機械応用工学科のJames Pikul助教授は語る。
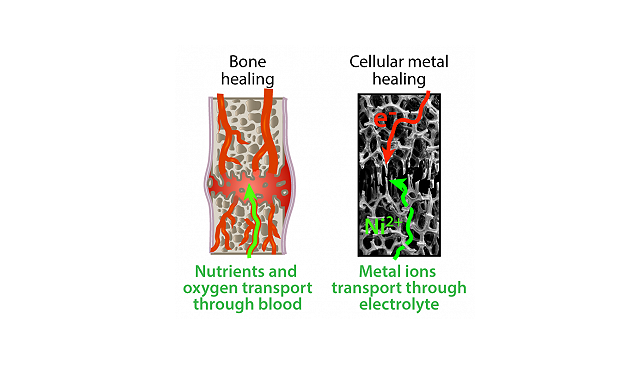
小型ロボットやデバイスを長期間作動させる電源として、研究チームは正極側の活物質として空気中の酸素を利用する金属空気電池に着目した。そして、負極として周囲環境にある金属表面を利用することで、構造をさらに小型化することにチャレンジした。この金属表面負極と空気側正極の間に、両極間で電子を伝導する電解質として水分子を含むハイドロゲルを挟み、接続されたデバイスに電力を供給するサンドイッチ型電池を考案した。
実証実験として、電動模型車両を電池に接続し、電池部分を後部に牽引しながら、アルミ表面上を永続的に旋回走行させることに成功した。電力密度は130mW/cm2で、最も優れた環境発電の10倍、エネルギー密度はリチウムイオン電池の13倍の電池性能が得られることを明らかにした。
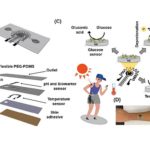
研究チームは、この開発技術がロボットの新しいパラダイムを開き、人間が食物を探すようにロボットが金属を探し、その化学エネルギーを取り入れて電力にできるようになると考えている。現在、ペンシルベニア大学のビジネスコンテストY-Prize賞の受賞者が、この開発技術を用いて、開発途上国の電力網外の安価な照明や、輸送コンテナの監視用センサーの電源といった実用化を計画している。
関連リンク
Penn Engineering’s New Scavenger Technology Allows Robots to ‘Eat’ Metal for Energy