- 2020-12-24
- 技術ニュース, 機械系, 海外ニュース
- 2020 IEEE International Conference on Automation Science and Engineering(CASE), ばね構造, サーボモーター, ピボット操作, ロボットグリッパー, 折り紙, 香港科技大学
YouTube/kzc tony
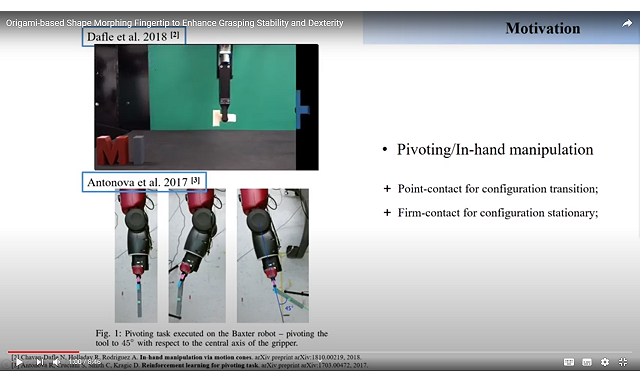
香港科技大学の研究チームは、折り紙をヒントに、安定して器用に物を掴めるロボットグリッパーを開発した。先端形状を凸面、凹面、平面などに変形させることで、丸いものや尖ったものでも把持できる。研究結果は、2020年8月20~21日にオンライン開催された「2020 IEEE International Conference on Automation Science and Engineering(CASE)」で発表された。
研究チームは、以前から折り目パターンのばね構造に関心を持っており、2019年にもソフトグリッパーを開発している。しかし、ロボットの指先が平らだったため、器用さに欠け、組み立てラインなど用途が限られることが想定された。
今回新たに開発したグリッパーは、折り紙ベースの骨格とモーター駆動の4節リンク機構を組み合わせることで、物体の把持の安定性と器用さを兼ね備えている。四葉のクローバーのような形状の指先を、4つのサーボモーターで別々に制御することで、凸面、凹面、傾斜平面と3種類に変えることができる。
実験では、凸面モードで円柱をピボット操作したり、凹面モードで楕円体や角錐を掴んだり、傾斜平面モードで物体の向きを変えたりして、変形モードの有効性と把持力の安定性を示した。
今後は、さらにグリッパーの形状や動作モデルの最適化、閉ループ制御などを予定している。
関連リンク
Origami-based Shape Morphing Fingertip to Enhance Grasping Stability and Dexterity