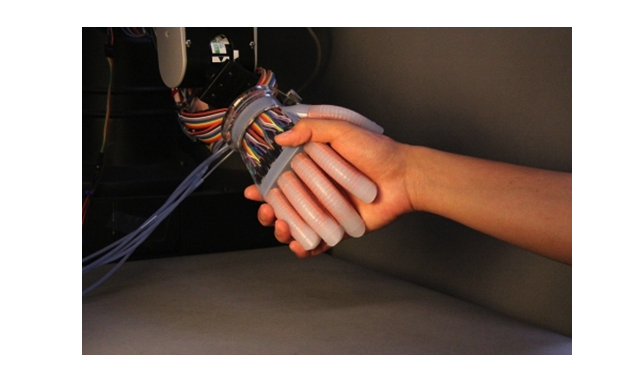
現在のロボットでは、「物をつかむ」「接触したかどうかを認識する」といった単純な動作は得意だが、対象物の形状や柔らかさに合わせて繊細な動作を再現するのは難しい。そんな課題に向き合おうと、コーネル大学の研究チームは物を柔らかくつかみ、物の形状や手触りを感知できる人工義手を開発した。
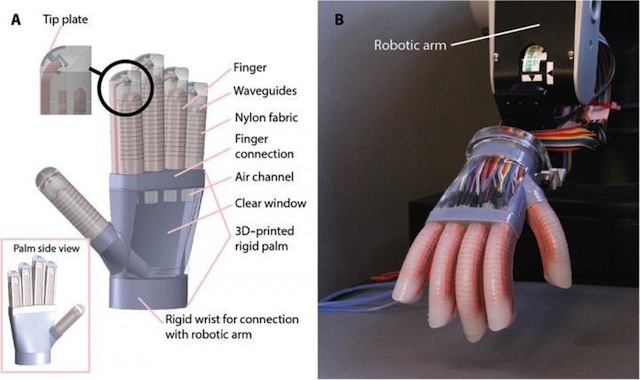
同チームが生み出した人工義手は、伸縮自在な光導波路を組み込み、曲がり・伸び・力に対するセンサとして活用。空気圧アクチュエータで動作するようにしたものだ。
研究チームのHuichan Zhao氏はその仕組みについて、「大多数のロボットは、センサがボディの外表面にあるので、物を表面から感知する。一方、われわれの人工義手は光導波路、つまりセンサを内側に搭載しているため、ボディの表面層を通って内部に伝達された力の刺激を感知する。人間をはじめとする全ての動物が、神経に刺激が伝達されて痛さを感じるのと同じ仕組みだ」と説明する。
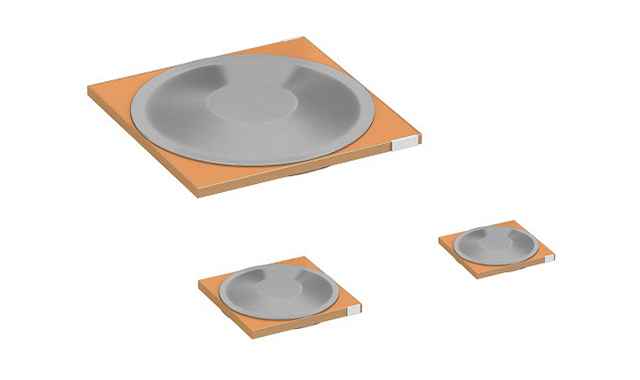
光導波路は1970年代の始めごろから実用化されてきたが、その製作工程は当初複雑だった。だが、過去20年間に出現・発展したソフト・リソグラフィや3Dプリンティングのおかげで簡略化できるようになった。それどころか、エラストマーのマイクロ鋳型と転写技術によるソフト・リソグラフィを使ったナノパターン化が可能になり、ソフトロボットに組み込めるほど小型・柔軟な光導波路の作製が可能になってきた。
そのような背景があって、研究チームは今回、4段階のソフト・リソグラフィによって光が伝播するコア部分を作製した。その後、コアの外表面を被覆し、LEDとフォトダイオードを取り付けて人工義手に組み込んだ。
こうして作製された人工義手では、指などを動かして一部が変形すると、コアを伝播する光の多くが失われ、その変化がフォトダイオードによって検出される。この光損失の変化に従って、曲がり・伸び・力を感じることができるわけだ。研究チームを率いるRobert Shepherd氏は、「光損失の量は、どのように変形されたかに依存する」と話している。
同研究チームは、この人工義手の能力について、さまざまなタスクを通じて検証してきた。特に注目に値する成果としては、人工義手が3個のトマトを触り、軟らかさによってどれが一番熟しているかを判別できたことが紹介されている。