- 2021-5-14
- 技術ニュース, 機械系, 海外ニュース
- LOLA, ナビゲーションモジュール, ブラシレスDCモーター, マルチコンタクトロコモーション, ミュンヘン工科大学, 人型ロボット, 電動ヒューマノイド
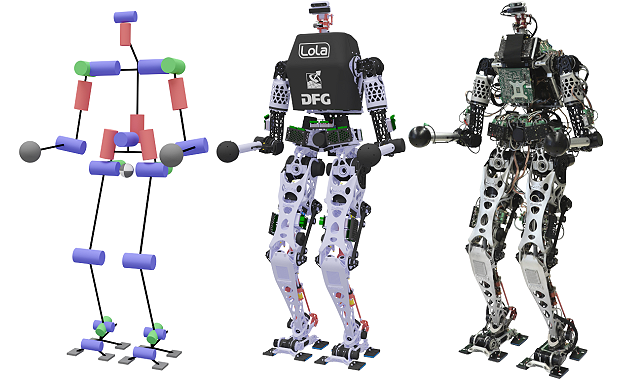
独ミュンヘン工科大学は、2021年3月16日、人型ロボット「LOLA」を大幅に改良し、脚以外の部位も周囲の物と接触させて動作するマルチコンタクトロコモーションにより、LOLAがさまざまな歩行や動作をする様子を撮影した動画を公開した。
人間の主な移動手段は脚だが、バランスを保つために受動的に腕を使ったり、近くの物に手を出して安定させるように能動的に腕を使ったりする場面はたくさんある。例えば、非常に不安定な場所やつまずいたときの影響が非常に大きい状況下で歩くような場合だ。事前に周囲の状況を把握するには限界があるため、マルチコンタクトロコモーションを使うことはロボットにとっても有用だが、二足歩行ロボットが脚以外の物を移動手段として使用することは、ソフトウェアとハードウェアの両面で困難だった。
今回、マルチコンタクトロコモーションが可能になったLOLAは、ブラシレスDCモーターで駆動する26個の関節を持ち、総重量68kg、身長176cmの電動ヒューマノイドだ。
公開された動画では、LOLAが左右に設置された壁に手を突いてさまざまな障害物の上を問題なく歩く様子、足踏みしながら壁に片方の腕先を突いた状態で肩のあたりを押されても倒れない様子や、テーブルや壁に手を突きながら歩く様子などが映っている。
カメラによる入力は一切使用していないので、この動画で映っているLOLAには、技術的には人間の視覚に相当する機能がない。今回行われた実験では、ナビゲーションモジュールが無効になっているため、足場の位置や手の接触点は手動で設定されている。
外から押される行為や、でこぼこの表面、2本の丸棒の上に置かれているだけの不安定な板などはLOLAには判別できないので、研究チームがオンライン安定化手法によって補正している。また、アルゴリズムは全てオンボードでリアルタイム実行されており、ロボットの関節は位置制御されている。
まだ初期段階ではあるが、LOLAは大変人間らしい二足歩行を実現しているといえるだろう。