- 2021-12-15
- 技術ニュース, 機械系, 海外ニュース
- Robert D. Howe, Science Robotics, ふくらはぎ, アクチュエーター, ハーバード大学ジョンA.ポールソン工学応用科学部(SEAS), パワードスーツ, リチウムイオンバッテリー, 外骨格, 学術, 歩行支援用ウェアラブルロボット, 超音波プローブ

HarvardBiodesignLab/YouTube
米ハーバード大学ジョンA.ポールソン工学応用科学部(SEAS)の研究チームは、人の歩行速度や地面の傾斜角度に合わせた歩行支援ができる外骨格型のパワードスーツを開発した。超音波で筋肉の動きを直接測定し、最適な力で着用者に順応した動きができる。研究結果は、2021年11月10日付けの『Science Robotics』に掲載されている。
約束に遅れないよう急いだり、公園をのんびり散歩したりと、私たちは状況に応じて歩く速さを変える。また、急な坂道や、緩やかな建物のスロープなど、地面の傾斜もさまざまだ。環境的な変化に加え、身長、年齢、筋力、あるいは病気など、さまざまな理由からスムーズな歩行を必要とする人々のために、ウェアラブルロボットのニーズは高い。
これまで、歩行支援用ウェアラブルロボットと着用者の動きを合わせるには、手動または自動で何時間もかけて調整する必要があった。健康な人にとっては面倒な作業で、高齢者や病気を抱えた人にとっては困難な場合もある。そうしたパワードスーツは足のダイナミックな動きに着目していたが、研究チームは、筋肉と腱の働きに着目し、超音波で筋肉の動きを測定するという新しいアプローチで、数秒で個人の状況や環境に合うように調整する方法を開発した。
まず、研究チームは携帯型の超音波システムを被験者のふくらはぎに巻き付け、さまざまな歩き方をしたときの筋肉の動きを可視化した。このように前もって記録した画像から、ふくらはぎの筋肉に沿って加えるアシスト力を見積もった。筋肉のプロファイルを得るには、ほんの少し歩くだけ、一歩だけでも十分かもしれないという。
次に、パワードスーツの有無による代謝エネルギーの違いを分析した。研究チームの作製したパワードスーツは、さまざまな歩行速度、傾斜角度に対して、従来より少ないアシスト力でも大幅に代謝エネルギーを削減することが分かった。筋肉を直接計測することで、着用者に過度の力を加えることなく協調した動作ができるパワードスーツを提供できるとしている。
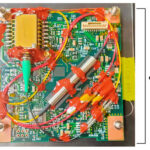
野外の歩行テストに利用したパワードスーツは、ふくらはぎには超音波プローブと、かかとに付けた滑車と繋がったアクチュエーター、腰には制御BOXとリチウムイオンバッテリー、背中には制御用ノートPCが入ったリュックを背負っている。パワードスーツは、歩行速度と傾斜に素早く対応できることを確認した。
今後は、定期的にリアルタイムの調整ができるパワードスーツの開発を目指している。「我々の筋肉ベースの手法は、人間の歩行に真の利益をもたらす個別の補助プロファイルを比較的速く生成できる」と、論文の共著者であるRobert D. Howe教授は語る。