タグ:Science Robotics
-

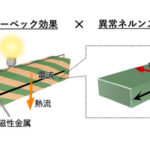
次世代型ロボットの性能を高める新機構モーターを考案
スタンフォード大学の研究チームは、バネを用いた新しいタイプのアクチュエーターを開発し、それを利用して動的な動きをより効率的に行うことができる電気モーターを考案した。この電気モーターは、一般的な電気モーターよりも大幅に少な…詳細を見る-
-

-
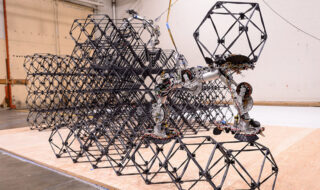
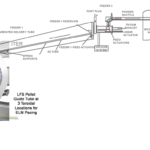
NASA、チームで活動するロボットによる宇宙構造物の建設プロジェクトを推進中
アメリカ航空宇宙局(NASA)は、自律動作するロボット群が大型の宇宙構造物を建設するシステムを開発している。今回、システムのテスト結果を2024年1月17日付けの『Science Robotics』誌に掲載したと発表した…詳細を見る-
-
-

人工の蜂の巣を使い、ミツバチのコロニーを制御する研究
スイス連邦工科大学ローザンヌ校(EPFL)とオーストリアのグラーツ大学の研究チームは、飼育シートにカモフラージュしたロボットシステムを巣箱に組み込み、セイヨウミツバチの集団行動を観察し、行動変容を促すことに成功した。研究…詳細を見る-
-
-
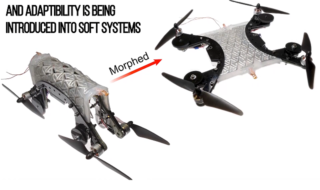
車からドローンに変形――液体金属を使ったキリガミベースの複合材料を開発
バージニア工科大学の研究チームは、液体金属と切り紙ベースの構造を利用して、車両からドローンへ変形可能な自律ロボットを開発した。ギアやモーターを使うことなく、何度でも変形し、形状を維持し、元の姿に戻ることができる。研究結果…詳細を見る-
-
-

歩行速度や傾斜度に合わせてアシスト――パーソナライズできる個人向けパワードスーツを開発
米ハーバード大学ジョンA.ポールソン工学応用科学部(SEAS)の研究チームは、人の歩行速度や地面の傾斜角度に合わせた歩行支援ができる外骨格型のパワードスーツを開発した。超音波で筋肉の動きを直接測定し、最適な力で着用者に順…詳細を見る-
-
-
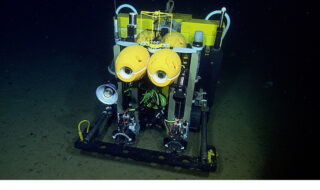
水深4000mの海底を自律走行――海洋の炭素循環を長期モニターする「Benthic Rover II」
MBARI(モントレー湾水族館研究所)の研究チームは、気候変動を考える上で重要となる海洋の炭素循環を長期間測定するために、自律走行ロボットローバー「Benthic Rover II」を開発した。水深4000mの海底で水温…詳細を見る-
-
-

プロペラで空を飛び、スケートボードにも乗れる2足歩行ロボット「LEONARDO」
カリフォルニア工科大学の研究チームは、脚に関節、肩にプロペラを備え、歩行と飛行を組み合わせた動きをする2足ロボット「LEONARDO(LEgs ONboARD drOne)」を開発した。歩いたり飛び上がったりするだけでな…詳細を見る-
-
-
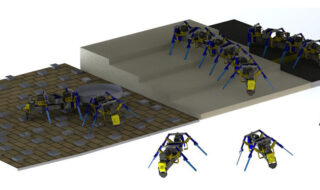
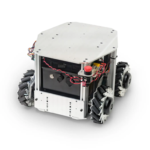
救助信号を出して複数台が連結――群ロボットとして機能する多脚ロボットを開発
米ノートルダム大学の研究者らは、群ロボットとしても機能する多脚ロボットを開発した。1台では脚が引っ掛かったりして通過できない凸凹道や段差も、数台が連結することで進むことができる。捜索および救助活動、輸送、宇宙探査、環境モ…詳細を見る-
-
-
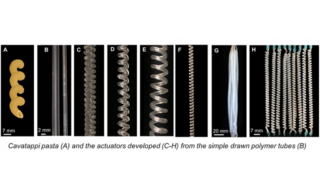
人間の10倍の仕事ができる、ポリマーベースの人工筋肉を開発
米ノーザンアリゾナ大学(NAU)の研究チームは、柔軟で低コスト、高効率の人工筋肉を開発した。ねじれたパスタのような形のアクチュエータは、人間の骨格筋をしのぐ性能も見せた。ソフトロボットや歩行ロボットのほか、外骨格や義肢と…詳細を見る-
-
-

折り紙をヒントに路面に応じて形を変えるタイヤを開発――凸凹道も砂地も平気
ソウル大学校(SNU)は、ハーバード大学、韓国のタイヤメーカーHankook Tireと共同で、路面の状況に応じて走行中でもサイズを変えられるタイヤを開発した。折り紙の「Waterbomb Tessellation」パタ…詳細を見る-
-