- 2022-6-29
- ニュース, 制御・IT系, 技術ニュース, 機械系
- HMD, VR(仮想現実), ロボット, ロボットアーム, ロボティクス, 余剰肢, 先端科学技術研究センター, 慶應義塾大学, 東京大学, 研究, 豊橋技術科学大学, 身体化
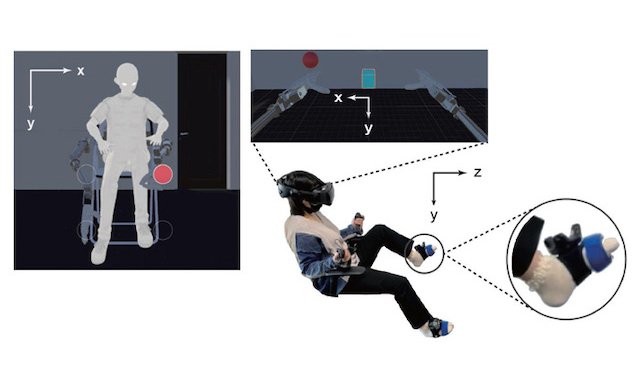
システム装用を練習するためのボールタッチ課題(装用者は第一人称視点でロボットアームを視認している)
東京大学 先端科学技術研究センターは2022年6月27日、同センター、東京大学大学院、慶應義塾大学大学院および豊橋技術科学大学大学院の共同研究チームが、VR(仮想現実)環境で足先と連動する余剰肢ロボットアームを開発したと発表した。装用者は、第3、第4の腕が生じたような感覚が芽生えたとしている。
人工的に設計した余剰肢を付加する「余剰肢ロボティクス」は、身体機能を拡張する技術として期待されている。一方で、これまで設計や制御における検討は進んでいるものの、身体の一部のようにロボットシステムを操作可能かどうかについては十分に研究が進んでいなかった。
また、「身体化」と呼ばれる、元来自身の身体に属さないものを自身の身体として捉えられるようになる感覚については、認知科学や神経科学において先行研究が存在している。ただし、杖やハサミといった「代替」や「延伸」に関しては着目されているものの、余剰肢ロボティクスのような「付加」に伴う知覚変化を検討した先行例は多くない。
今回同研究チームが開発したシステムは、一人称視点による視覚情報を投影するHMD(ヘッドマウントディスプレイ)、装用者の動きを検知するトラッカーおよび触覚提示デバイスにより構成される。触覚提示デバイスは、VR空間にて余剰肢ロボットアームでボールを触った際に、足先に反応を返すものとなっている。
余剰肢ロボットシステム
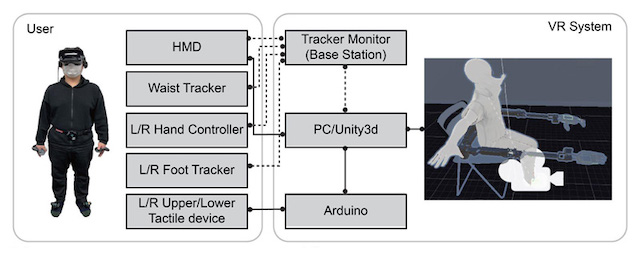
システム概要図
(点線は無線接続、実線は有線接続)
頭部/腰/右手/左手/右足/左足の6箇所に装着したセンサーにより捕捉された装用者の動きが、VR環境上のアバターの全身運動やロボットアームの関節角度に変換される。
視覚/触覚フィードバック(ヒトの視覚および触覚を通じてあるイベントや現象に関する情報を伝達すること)における遅延を防ぎ、装用時の動作がスムーズになるように、余剰肢ロボットシステムの一部は無線化されている。
同研究チームは、健常者16名による実証実験を実施した。参加者は、余剰肢ロボットアームでボールを触るという課題に取り組んだ後、身体感覚に関する7段階評価のアンケートに回答している。
得られた回答は、主観評価スコアとして解析された。冒頭の画像は、実験の様子を示している。
同スコアにより、参加者が余剰肢ロボットシステムを装着して用いた後、ある対象を自身の身体の一部(もしくは全て)のように感じる身体所有感、自身の意図に基づいてある対象を実施したと感じる行為主体感、自身の位置がある対象が存在する位置に重なって存在するように感じる自己位置感覚を得たという結果が示された。
また、視覚/触覚フィードバックに対する応答時間を計測したところ、余剰肢ロボットアームの装用前後で応答時間が大きく変化した。これは、ロボットアーム周辺に生じた視覚と触覚の情報統合において、知覚変化を捉えた可能性を示している。
さらに、自身の身体周辺における知覚変化と余剰肢感覚(自分の腕が増えたと感じる主観評価)が、正の相関関係にあることも判明した。
今回の余剰肢感覚の出現は、余剰肢ロボットシステムを設計するにあたって抵抗が少ない操作を検討するための重要な指標となるものとみられる。また、認知科学分野においても、身体化に関する議論がさらに進むことが期待される。