- 2022-8-8
- 化学・素材系, 技術ニュース, 海外ニュース
- Qibing Pei, Science, SRIインターナショナル, ウェアラブルデバイス, カリフォルニア大学ロサンゼルス校, ハプティックデバイス, ロボット, 人工筋肉, 学術, 誘電エラストマー, 高性能誘電エラストマー(PHDE)
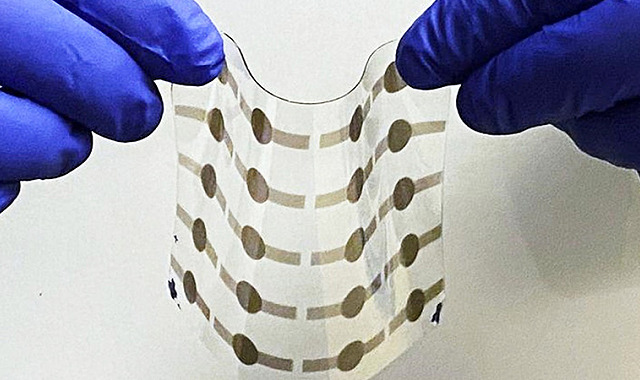
Courtesy of Qibing Pei/UCLA
カリフォルニア大学ロサンゼルス校とSRIインターナショナルの研究チームは、本物よりも強靭で柔軟な人工筋肉を開発した。より人間に近い、もしくはそれを上回る動きや性能を備えた次世代のロボットやウェアラブルデバイス、触覚を作り出すハプティックデバイスへの利用が期待される。研究結果は、2022年7月7日付けの『Science』に掲載されている。
人工筋肉に使う材料には、大きな変形を与えても仕事をし、何回動作を繰り返しても形状や強度が変わらないことが必要だ。そのため、軽量で適度な強靭性と柔軟性を備えた、アクリルまたはシリコーン系の誘電エラストマーが採用されることが多い。ただし、アクリル系は変形に強いが、事前に引き伸ばす工程が必要で、柔軟性は劣る。一方でシリコーン系は製造しやすいが、大きな変形には弱いという欠点がある。
研究チームは、市販の化学製品を使い、製造プロセスを最適化することで、アクリル系の強度と耐久性を維持したまま、曲げやすく、調整可能、拡張が容易な「高性能誘電エラストマー(PHDE)」フィルムを開発した。材料の水素結合により、応力ひずみ応答性と粘弾性を調整し、ポリマー鎖間の架橋により、エラストマーをより柔らかく柔軟にした。フィルムを電極で挟むことで、アクチュエーターとして機能する。
PHDEフィルム単体の厚みは、約35μmと薄くて軽量だ。研究チームは、アクチュエーターの出力を上げるため、ブレードコーティングとUV硬化を利用して、フィルムを高度に多層化できる乾式積層法も開発した。これにより、4~50層の均一なPHDEフィルムでできた人工筋肉を作製した。曲げや衝撃にも強く、メガパスカル級の力を発揮しつつ、本物の筋肉より3~10倍高い柔軟性を持っている。
PHDEアクチュエーターの実証実験では、直径約1.2cmのクラゲ型ロボットをジャンプさせたり、自重の約20倍あるボールを高く打ち上げたりすることに成功した。電圧のオンオフで伸縮する姿は横隔膜のようで、人工筋肉の将来が垣間見える。
「この柔軟で多様性があり効率的なアクチュエーターは、人工筋肉への扉を開き、新世代のロボット、センサーやウェアラブル技術において、人間のような動きや能力をより正確にまねしたり、改善したりできる可能性がある」と、研究チームを率いるQibing Pei教授は語る。また、新しい乾式積層法は、マイクロ流体技術、組織工学、微細加工といったほかのソフト薄膜材料にも適応できるとも考えている。
関連リンク
UCLA Scientists Develop Durable Material for Flexible Artificial Muscles