- 2022-8-15
- 制御・IT系, 技術ニュース, 海外ニュース
- 3Dトラッキングソフトウェア, 3D飛行シミュレーション, Science, コーネル大学, トンボ, ハイスピードカメラ, ハワード・ヒューズ医学研究所, 学術, 昆虫, 物理モデリング, 物理学, 神経制御, 運動学的分析
トンボが落下中に正しい飛行姿勢へ戻ることを可能にする複雑な物理学と神経制御が解明された。この研究は米コーネル大学とハワード・ヒューズ医学研究所によるもので、2022年5月12日付で『Science』に掲載された。
昆虫は最も種が豊富な生物であり、空中飛行を最初に発見した生物だ。飛行には複雑な動作が伴うが、とりわけ重要なのは、空中で180度ひっくり返った後、真っすぐな飛行姿勢に戻る過程だ。研究者らは、最も古い昆虫の1つであるトンボが空中でどのように正しい姿勢に戻しているかを調べることで、飛行の起源と、動物が空中でバランスを取りながら空間を飛行するための神経回路をどのように進化させたのかについて、洞察を得られると考えた。
研究チームは、トンボがひっくり返った後に正しい飛行姿勢に戻る過程を把握するために、実験と生物物理学モデルを組み合わせた。まず、トンボを磁気テザーから逆さに落とすという行動制御実験を設計。そして、脚を接触させないようにトンボを慎重に放つと、トンボが同じパターンの動きをすることが分かった。ハイスピードカメラ3台を用いてその動きを1秒間に4000枚の撮影速度で高速撮影することに成功し、トンボの羽と体にマーカーを付けて、3Dトラッキングソフトウェアで動きを再現した。
最も難しかったのは、その動きを理解することだった。羽と空気との相互作用による不安定な空気力学から、羽ばたきに対するトンボの体の反応、そして地球上の全ての生物に作用する重力など、多数の要素を考慮しなければならなかったからだ。
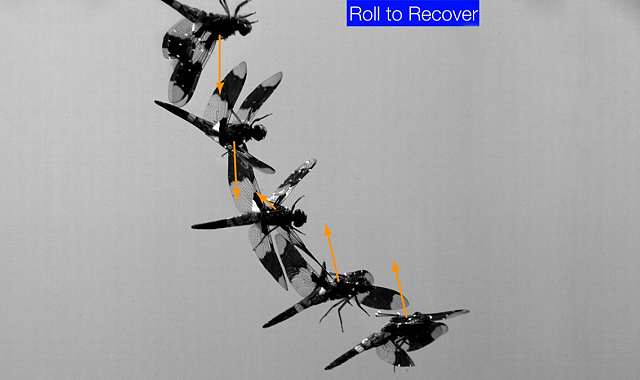
研究チームは、トンボの曲芸飛行をうまくシミュレートする計算モデルを作成することができた。その結果、トンボは左右の羽のピッチが対称ではないことを利用して、体を180度回転させ、逆さまに落ちている状態から200ミリ秒程度で姿勢を回復していることが明らかになった。
しかし、トンボはどうやって自分が落下していることを知り、飛行軌道を修正するのかという重要な疑問が残った。そこで、チームの1人が、トンボは1対の大きな複眼に単眼3個という2つの視覚システムを頼りに、地面に対して垂直状態であることを判断している可能性があることに気づいた。
この理論を検証するため、トンボの目を塗料でふさいで実験を繰り返したところ、トンボは飛行中に姿勢を回復するのがずっと困難になった。この実験から、トンボの姿勢回復反射を引き起こす経路は、視覚が最初のものであり、かつ支配的なものであることを示唆していると考えられた。
これらの結果から、トンボの飛行姿勢回復には、視覚系から羽のピッチを調節する筋肉に送られる一連の神経信号が関与していることが分かった。
視覚的手がかりが一連の反射を引き起こし、トンボの4枚の羽に神経信号を送る。このとき、左側の羽と右側の羽のピッチが釣り合わないように一連の筋肉が適宜調整して、トンボの羽を動かす。落下しているトンボは羽を3〜4回羽ばたかせて180度回転し、元の姿勢に戻って飛行を再開することができる。
今回の研究で、運動学的分析、物理モデリング、3D飛行シミュレーションを組み合わせて、観察対象の動物の行動とその動物を制御するために動物の体内で起こることとの間に、極めて重要なつながりがあることを、非侵襲的に推測できるようになった。これらの知見は、小型の飛行機やロボットの性能を向上させようとする技術者も利用可能なものだ。