- 2022-9-7
- ニュース, 技術ニュース, 電気・電子系
- サイボーグ昆虫, シンガポール南洋理工大学, ポリマーフィルム, マダガスカルゴキブリ, 早稲田大学, 有機太陽電池, 無線通信, 理化学研究所, 研究

理化学研究所は2022年9月5日、同研究所や早稲田大学大学院創造理工学研究科、シンガポール南洋理工大学の共同研究チームが、光エネルギーで再充電できるサイボーグ昆虫を開発したと発表した。
小型のICを搭載したサイボーグ昆虫は、人間が入れないような環境でも長時間活動できる。都市型捜索救助や環境モニタリング、危険地域の検査といった用途での活用が期待されている。
サイボーグ昆虫の移動を遠隔から長時間コントロールし、環境データを取得するにあたっては、10mW以上を供給可能な太陽電池などの環境発電装置が必要となる。一方で、大型の太陽電池を採用した場合、サイズや重量により昆虫の運動能力が損なわれてしまう。このため、昆虫の運動能力を保ちながら10mW以上の出力を供給する方法が求められていた。
今回の研究では、体長約6cmのマダガスカルゴキブリの背中側に電子デバイスを搭載した。柔らかいバックパックを用いて無線移動制御モジュールやリチウムポリマー電池を昆虫の胸部背側の曲面に沿って取り付け、厚さ4μmの薄型有機太陽電池モジュールを腹部背側に取り付けた。
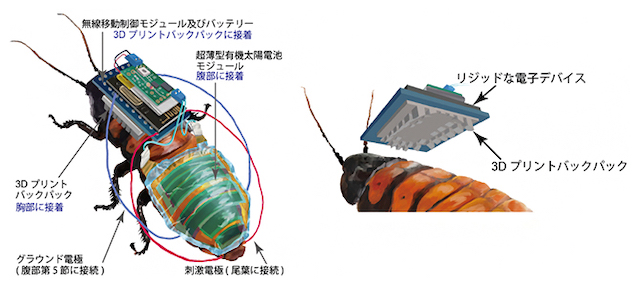
マダガスカルゴキブリの3Dモデルをベースにバックパックを設計し、3Dプリントにより弾性ポリマーを作製した。バックパックの昆虫と接する面は、胸部背側の曲面形状に合わせた柱状構造を採用している。
これらにより、昆虫の個体間の形状の違いの影響を受けずに曲面に完全にフィットし、硬い電子デバイスの安定した実装が可能となった。この接着は、繁殖環境において1カ月後も維持された。
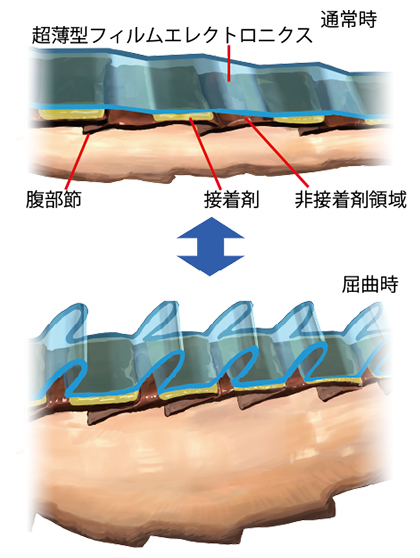
ポリマーフィルム上に作製した薄型有機太陽電池は、接着剤領域と非接着剤領域を交互に配置した「飛び石構造」で昆虫の腹部背側へ貼り付けた。腹部の動きの自由度を確保している。
この方法の有効性を、障害物を通過するのに要した時間により定量化した。昆虫腹部にフィルムを取り付けていない場合は中央値2.4秒、飛び石構造で厚さ3μmのフィルムを接着した場合は中央値2.2秒で通過している。一方で、厚いフィルムを用いた場合は、中央値4.2秒と通過に長い時間を要した。

障害物踏破試験
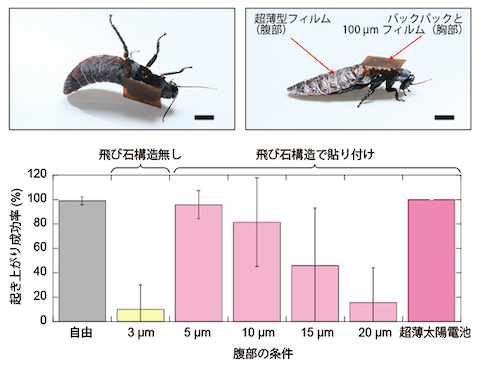
また、地面の上でひっくり返った状態の昆虫の起き上がり能力を確かめたところ、フィルム無しの昆虫の起き上がり成功率が99%、フィルムを飛び石構造で腹部背側に取り付けた場合の厚さ5μmと10μmのフィルムの起き上がり成功率がそれぞれ96%、81%となった。これに対して、厚さ4μmの薄型有機太陽電池モジュールを取り付けた際は、100%の起き上がり成功率を示している。
一方で、厚さ15μmと20μmのフィルムでは、それぞれ46%、16%となった。また、飛び石構造無しで厚さ2μmのフィルムを腹部に接着した場合は、起き上がり成功率は10%にまで低下した。
起き上がり試験
さらに、薄型有機太陽電池モジュールにおける昆虫腹部の曲面形状の有効面積を最大化したところ、最大17.2mWの出力を得られることが判明した。モジュールの有効面積は3.96cm2で、腹部面積に対する開口率51%に相当する。また、薄型太陽電池の有効面積当たりの重量は約5g/m2で、曲面上での重量当たりの電力は8.69W/gに相当する。
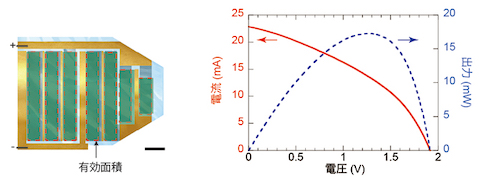
サイボーグ昆虫用薄型有機太陽電池モジュール
最後に、生きたサイボーグ昆虫を用いて充電と無線移動制御を検証した。バッテリーを完全に放電した後、疑似太陽光をサイボーグ昆虫の有機太陽電池モジュールに30分間照射した。
充電されたバッテリーからの電力を用いて、刺激のオン・オフを制御する信号をサイボーグ昆虫に無線受信させ、昆虫尾葉に接続した刺激電極へ約2分間にわたり刺激信号を入力した。右方向への移動制御を複数回試行し、無線制御が可能となったことを確認している。
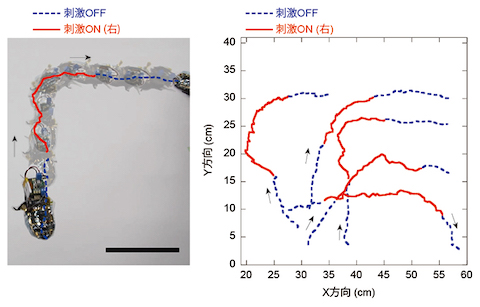
再充電可能なサイボーグ昆虫の無線通信による行動制御
今回の手法は、マダガスカルゴキブリ以外の昆虫種にも適用できる。今後は、制御回路をより薄型化し、センサーなど他のコンポーネントと組み合わせることで、サイボーグ昆虫の機能のさらなる拡大を図る。