- 2023-10-12
- 技術ニュース, 機械系, 海外ニュース
- Advanced Intelligent Systems, CLARI(Compliant Legged Articulated Robotic Insect), クモ型ロボット, コロラド大学ボルダー校, ゴキブリ, ポップアップ, ラミネート加工, ロボット, 学術, 昆虫
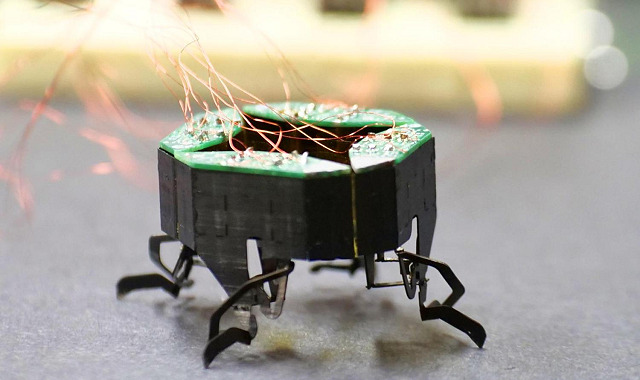
Credit: Casey Cass/CU Boulder
米コロラド大学ボルダー校の研究チームは、周囲の環境に合わせて受動的に変形しながら狭い隙間を通る、小型のロボットを開発した。この研究成果は昆虫からヒントを得たもので、2023年8月29日付の『Advanced Intelligent Systems』誌に掲載された。
この種のロボットの多くは、立方体に近い形状をもつものが多い。研究チームの1人は以前、ゴキブリが壁の隙間に入り込むように、自身の高さを約半分にまで圧縮して狭い空間を通るロボットを設計した。
研究チームは今回、水平方向の隙間を通り抜けるロボット「CLARI(Compliant Legged Articulated Robotic Insect)」を開発した。CLARIの機構は、虫のような脚関節を特徴とする。CLARIのサイズは手のひらに収まる大きさで、重さはピンポン玉よりも軽い。
CLARIの基本形状は、4辺に1本ずつ脚をもつ、正方形に近い状態だ。周囲の空間が狭くなると、正方形から細長く変形する。また、圧迫を受ける方向によって、カニのように幅を広げたり、ゴキブリのように細長く変形したりする。正方形の状態では幅約34mmで、幅約21mmの細長い形状に変形できる。
CLARIの各脚は、ほぼ独立して機能する。それぞれが回路基板と、人間の股関節のように脚を前後左右に駆動する2つのアクチュエーターを備える。モジュラー構造によって、脚のカスタマイズや追加が容易な設計だ。
理論的には、このモジュール構造によって、CLARIは多様な形状をとることができる。例えば、ワイルドに体をくねらせて進むロボットが出現する可能性もある。
CLARIの製造では、ラミネート加工の技術や、折り紙から考案された「ポップアップ」技術を用いている。ただし、現状ではワイヤーが繋がれており、このワイヤーで外部電源から給電し、基本的な命令を受信している。
CLARIの完成度は、初期の段階にある。研究チームは、CLARIがジェットエンジンの内部や倒壊した建物の瓦礫の中などの空間の中を、自律的に進めるようになることを期待している。大規模災害発生時の初期対応者を、これまでにない方法で支援できる可能性がある。
また、複雑な自然空間の中を移動するには、木や草の葉のような障害物を跳ね返したり、岩の隙間を押し進んだりする必要がある。
将来的にはCLARIにセンサーを組み込み、障害物を検知する機能も検討中だ。CLARIに柔軟性と強度の適切な組み合わせを与える方法も検討している。これは、脚の本数が増えれば増えるほど、技術的には高度なチャレンジになる。
研究チームの1人は、最終的にクモの巣の上を歩けるような、8本脚のクモ型ロボットを作りたいと説明した。