- 2023-10-20
- 技術ニュース, 機械系
- インハンドマニピュレーション, ステレオカメラ, パナソニック コネクト, ピックアンドプレース作業, ロボットハンド, ロボットハンド制御技術, ロボットビジョン技術, 中央大学, 研究
パナソニック コネクトは2023年10月19日、中央大学理工学部と共同で、つかんだものを落とさずに回し続けられる「ロボットハンド制御技術」を開発したと発表した。ロボットビジョン技術を生かし、フィンガとベルトを対象物の形状や姿勢に応じて制御する。
ロボットハンドで把持した対象物の位置や姿勢をハンド内で変更する動作を指すインハンドマニピュレーションは、高度な動作の一つとして注目されており、表面にコンベアベルトを巻いた複数のフィンガで構成されるロボットハンドが研究されている。しかし、姿勢を変更するために、ハンド内で対象物を回転させる際、対象物の形状や姿勢によってはつかみ続けられず、ハンドから落下する課題があった。
パナソニック コネクトはこの課題に対し、ロボットビジョン技術を活用。フィンガとベルトを対象物の形状や姿勢に応じて制御するシステムを開発した。対象物を落とさずに把持するには、対象物の表面とロボットハンドとが接触し続ける必要があるため、フィンガ同士の幅を対象物の形状や回転中の姿勢に合わせて調節しなければならない。しかし、フィンガが必要な幅の分だけ開閉しない状況もあることから、この状況を引き起こす2つの原因にアプローチする手法を開発した。
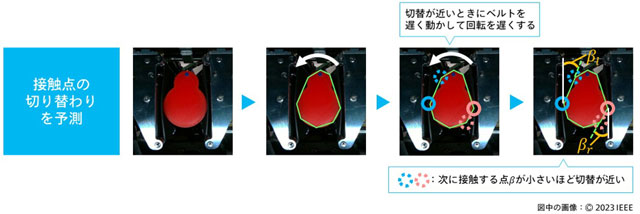
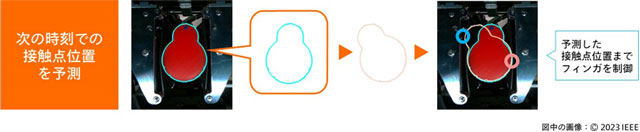
まず、1つ目のアプローチだが、カメラ画像を基に、接触点の切り替わりを予測する。そして、その前後に対象物の回転速度が最も遅くなるようにベルトを制御し、幅変化を抑える。次に2つ目のアプローチだが、次の時刻での対象物の位置や姿勢を予測する。そして、次の時刻で必要となる幅の分だけフィンガを制御し、遅延の影響を低減する。
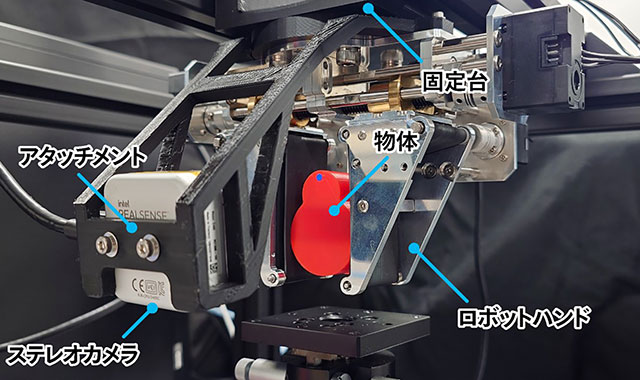
開発した制御システムは、各フィンガ表面を無限循環するベルトを備えた2指ハンドと、ハンドに正対する位置に設置したステレオカメラを用いる。
1つ目のアプローチには、対象物の領域をステレオカメラから取得した画像中から抽出し、その領域を囲う輪郭を取得して、この輪郭に、多角形近似と凸包算出を実施する。対象物とハンドとの現在の接触点は、凸包の頂点のうち、最も左および右に位置する点をする。さらに、残りの頂点の中から、対象物が回転し続ける場合に次にハンドと接触する点を予想して、次の接触点と定義。現在の接触点と次の接触点を結んだ線分が鉛直軸となす角を算出する。
これは、対象物が算出した角度の分だけ回転すると、接触点が切り替わることを示し、この角度が小さい場合は、接触点の切り替わりが近いことを表す。その際は、必要なフィンガ幅の変化が大きくなると考えられる。このとき、対象物の回転量が小さければ落下を防げるため、対象物の目標回転量を算出した角度に正比例するように定め、それに合わせてベルトを制御する。
この制御手法により、接触点の切り替わりが近いときには、ベルトが遅く動き、対象物の回転量も小さくなるため、フィンガ幅の変化を小さく抑えられる。
2つ目のアプローチにも、1つ目の処理の中で取得した輪郭と対象物の目標回転量を用いる。理想的な操作が1つ目のアプローチでできた場合、次の時刻に、対象物の輪郭は目標回転量の分だけ姿勢変更した状態になると考えられる。そこで、現在の輪郭に対し、目標分だけ回転した輪郭を算出。次の時刻での輪郭を推定する。
推定した輪郭のうち、最も左および右に位置する点を検出し、この点を次の時刻での接触点推定位置とする。フィンガをこの点に合わせて制御することで、次の時刻の推定値に合わせてフィンガが動くため、遅延の影響を減らせる。
形状11種、サイズ2種の22点の対象物にこの技術を用いて実験したところ、10点を1回転させることに成功した。提案手法を使用しない条件には、大きい対象物を落下させる割合が14.5%改善、小さい対象物を1回転させる割合が6.4%向上した。この技術は、インハンドマニピュレーションを実行できる対象物の種類、位置、姿勢の変更範囲の拡大につながると期待される。
開発した技術は、製造、物流、流通といったサプライチェーンの現場への貢献が見込まれる。中でも、これらの現場で扱われるモノのピックアンドプレース作業への活用が想定され、ロボットハンドで置かれたモノをピックし、インハンドマニピュレーションすることで、姿勢を変えた状態でプレースできる。研究グループは今後、技術の性能向上を目指す。